![]()
About SPlisHSPlasH¶
SPlisHSPlasH is an open-source library for the physically-based simulation of fluids. The simulation in this library is based on the Smoothed Particle Hydrodynamics (SPH) method which is a popular meshless Lagrangian approach to simulate complex fluid effects. The SPH formalism allows an efficient computation of a certain quantity of a fluid particle by considering only a finite set of neighboring particles. One of the most important research topics in the field of SPH methods is the simulation of incompressible fluids. SPlisHSPlasH implements current state-of-the-art pressure solvers (WCSPH, PCISPH, PBF, IISPH, DFSPH, PF) to simulate incompressibility. Moreover, the library provides different methods to simulate viscosity, surface tension and vorticity.
Main features¶
open-source SPH fluid simulation (2D & 3D)
neighborhood search on CPU or GPU
supports vectorization using AVX
Python binding (thanks to Stefan Jeske)
several implicit pressure solvers (WCSPH, PCISPH, PBF, IISPH, DFSPH, PF)
explicit and implicit viscosity methods
current surface tension approaches
different vorticity methods
computation of drag forces
support for multi-phase simulations
simulation of deformable solids
rigid-fluid coupling with static and dynamic bodies
two-way coupling with deformable solids
fluid emitters
scripted animation fields
a json-based scene file importer
automatic surface sampling
a tool for volume sampling of closed geometries
partio file export of all particle data
VTK file export of all particle data (enables the data import in ParaView)
rigid body export
a Maya plugin to model and generate scene files
License¶
The MIT License (MIT)
Copyright (c) 2016-present, SPlisHSPlasH contributors
Permission is hereby granted, free of charge, to any person obtaining a copy of this software and associated documentation files (the “Software”), to deal in the Software without restriction, including without limitation the rights to use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of the Software, and to permit persons to whom the Software is furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED “AS IS”, WITHOUT WARRANTY OF ANY KIND, EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
Getting started¶
This page should give you a short overview of SPlisHSPlasH.
SPlisHSPlasH currently consists of a simulators and different tools which are introduced in the following:
SPHSimulator¶
This application reads a SPlisHSPlasH scene file and performs a simulation of the scene.
The scene file format is explained here.
Command line options:¶
-h, –help: Print help text.
-v, –version: Print version.
–no-cache: Disable caching of boundary samples/maps.
–state-file: Load a simulation state of the corresponding scene.
–output-dir: Output directory for log file and partio files.
–no-initial-pause: Disable caching of boundary samples/maps.
–no-gui: Disable graphical user interface. The simulation is run only in the command line without graphical output. The “stopAt” option must be set in the scene file or by the next parameter.
–stopAt arg: Sets or overwrites the stopAt parameter of the scene.
–param arg: Sets or overwrites a parameter of the scene.
Setting a fluid parameter:
: : Example: –param Fluid:viscosity:0.01
Setting a configuration parameter:
: Example: –param cflMethod:1
Hotkeys¶
Space: pause/contiunue simulation
r: reset simulation
w: wireframe rendering of meshes
m: recompute min and max values for color-coding the color field in the rendering process
i: print all field information of the selected particles to the console
s: save current simulation state
l: load simulation state (currently only Windows)
ESC: exit
Python bindings¶
SPlisHSPlasH implements bindings for python using pybind11. See the getting started guide.
Impatient installation guide¶
In order to install, simply clone the repository and run pip install on the repository. It is recommended, that you set up a virtual environment for this, because cache files will be stored in the directory of the python installation along with models and scene files.
git clone https://github.com/InteractiveComputerGraphics/SPlisHSPlasH.git
pip install SPlisHSPlasH/
Tools¶
partio2vtk¶
A tool to convert partion files in vtk files. In this way the particle data which is exported from SPlisHSPlasH can be converted to the vtk format. This is useful to import the data in ParaView for visualization.
PartioViewer¶
The simulators can export the particle simulation data using the partio file format. The PartioViewer can read such a file and render the particle data using OpenGL. This tool is able to handle multiphase data and rigid body data. It can create image sequences and movies (using ffmpeg).
To visualize a sequence of partio files or a single file, call (the index in the file name is used for the sequence):
PartioViewer fluid_data_1.bgeo
This tool is also able to read a complete output directory:
PartioViewer output/DamBreakModel
In this case the tool searches for the partio files of multiple phases in the subdirectory “partio” and for rigid body data in “rigid_bodies”.
Note: To generate videos you must tell PartioViewer where it can find the ffmpeg executable.
Command line options:¶
-h, –help: Print help
–renderSequence: Render a sequence from startFrame to endFrame as jpeg.
–renderVideo: Render a sequence from startFrame to endFrame as video.This function requires ffmpeg which must be in the PATH or the ffmpegPath parameter must be set.
–noOverwrite: Do not overwrite existing frames when using –renderSequence option. Existing frames are not loaded at all which accelerates the image sequence generation.
-o, –outdir arg: Output directory for images
–rbData arg: Rigid body data to visualize (bin file)
–ffmpegPath arg: Path of the ffmpeg excutable.
–width arg: Width of the image in pixels. (default: 1024)
–height arg: Height of the image in pixels. (default: 768)
–fps arg: Frame rate of video. (default: 25)
-r, –radius arg: Particle radius (default: 0.025)
-s, –startFrame arg: Start frame (only used if value is >= 0) (default: -1)
-e, –endFrame arg: End frame (only used if value is >= 0) (default: -1)
–colorField arg: Name of field that is used for the color. (default: velocity)
–colorMapType arg: Color map (0=None, 1=Jet, 2=Plasma) (default: 1)
–renderMinValue arg: Min value of field. (default: 0.0)
–renderMaxValue arg: Max value of field. (default: 10.0)
–camPos arg: Camera position (e.g. –camPos “0 1 5”) (default: 0 3 10)
–camLookat arg: Camera lookat (e.g. –camLookat “0 0 0”) (default: 0 0 0)
Hotkeys¶
Space: pause/contiunue simulation
r: reset simulation
w: wireframe rendering of meshes
i: print all field information of the selected particles to the console
s: save current frame as jpg image
v: generate video
j: generate image sequence
+: step to next frame
-: step to previous frame
ESC: exit
SurfaceSampling¶
A popular boundary handling method which is also implemented in SPlisHSPlasH uses a particle sampling of the surfaces of all boundary objects. This command line tool can generate such a surface sampling. Note that the same surface sampling is also integrated in the simulators and the samplings are generated automatically if they are required. However, if you want to generate a surface sampling manually, then you can use this tool.
VolumeSampling¶
The simulators can load particle data from partio files. This particle data then defines the initial configuration of the particles in the simulation. The VolumeSampling tool allows you to sample a volumetric object with particle data. This means you can load an OBJ file with a closed surface geometry and sample the interior with particles.
SPlisHSPlasH Scene Files¶
A SPlisHSPlasH scene file is a json file which can contain the following blocks:
Configuration
FluidBlocks
FluidModels
Emitters
RigidBodies
Fluid parameter block
Animation fields
Configuration¶
This part contains the general settings of the simulation and the pressure solver.
Example code:
"Configuration":
{
"pause": true,
"sim2D": false,
"timeStepSize": 0.001,
"numberOfStepsPerRenderUpdate": 2,
"particleRadius": 0.025,
"simulationMethod": 4,
"gravitation": [0.0,-9.81,0],
"cflMethod": 1,
"cflFactor": 1,
"cflMaxTimeStepSize": 0.005,
"maxIterations": 100,
"maxError": 0.01,
"maxIterationsV": 100,
"maxErrorV": 0.1,
"stiffness": 50000,
"exponent": 7,
"velocityUpdateMethod": 0,
"enableDivergenceSolver": true
}
General:¶
pause (bool): Pause simulation at beginning.
pauseAt (float): Pause simulation at the given time. When the value is negative, the simulation is not paused.
stopAt (float): Stop simulation at the given time and exit. When the value is negative, the simulation is not stopped.
cameraPosition (vec3): Initial position of the camera.
cameraLookat (vec3): Lookat point of the camera.
Visualization:¶
numberOfStepsPerRenderUpdate (int): Number of simulation steps per rendered frame
renderWalls (int):
0: None
1: Particles (all)
2: Particles (no walls)
3: Geometry (all)
4: Geometry (no walls)
Export¶
enablePartioExport (bool): Enable/disable partio export (default: false).
enableVTKExport (bool): Enable/disable VTK export (default: false).
enableRigidBodyExport (bool): Enable/disable rigid body export (default: false).
enableRigidBodyVTKExport (bool): Enable/disable rigid body VTK export (default: false).
dataExportFPS (float): Frame rate of particle and rigid body export (default: 25).
particleAttributes (string): A list of attribute names separated by “;” that should be exported in the particle files (e.g. “velocity;density”) (default: “velocity”).
enableStateExport (bool): Enable/disable export of complete simulation state (default: false).
stateExportFPS (float): Frame rate of simulation state export (default: 1).
Simulation:¶
timeStepSize (float): The initial time step size used for the time integration. If you use an adaptive time stepping, this size will change during the simulation (default: 0.001).
particleRadius (float): The radius of the particles in the simulation (all have the same radius) (default: 0.025).
sim2D (bool): If this parameter is set to true, a 2D simulation is performend instead of a 3D simulation (default: false).
enableZSort (bool): Enable z-sort to improve cache hits and therefore to improve the performance (default: true).
gravitation (vec3): Vector to define the gravitational acceleration (default: [0,-9.81,0]).
maxIterations (int): Maximal number of iterations of the pressure solver (default: 100).
maxError (float): Maximal density error in percent which the pressure solver tolerates (default: 0.01).
boundaryHandlingMethod (int): The boundary handling method that is used in the simulation (default: 2, Volume Maps):
0: particle-based boundaries (Akinci et al. 2012)
1: density maps (Koschier et al. 2017)
2: volume maps (Bender et al. 2019)
simulationMethod (int): The pressure solver method used in the simulation (default: 4, DFSPH):
0: Weakly compressible SPH for free surface flows (WCSPH)
1: Predictive-corrective incompressible SPH (PCISPH)
2: Position based fluids (PBF)
3: Implicit incompressible SPH (IISPH)
4: Divergence-free smoothed particle hydrodynamics (DFSPH)
5: Projective Fluids (dynamic boundaries not supported yet)
WCSPH parameters:¶
stiffness (float): Stiffness coefficient of the equation of state.
exponent (float): Exponent in the equation of state.
PBF parameters:¶
velocityUpdateMethod (int):
0: First Order Update
1: Second Order Update
DFSPH parameters:¶
enableDivergenceSolver (bool): Turn divergence solver on/off.
maxIterationsV (int): Maximal number of iterations of the divergence solver.
maxErrorV (float): Maximal divergence error in percent which the pressure solver tolerates.
Projective Fluids parameters:¶
stiffness (float): Stiffness coefficient used by the pressure solver.
Kernel:¶
kernel (int): Kernel function used in the SPH model.
For a 3D simulation:
0: Cubic spline
1: Wendland quintic C2
2: Poly6
3: Spiky
4: Precomputed cubic spline (faster than cubic spline)
For a 2D simulation:
0: Cubic spline
1: Wendland quintic C2
gradKernel (int): Gradient of the kernel function used in the SPH model.
For a 3D simulation:
0: Cubic spline
1: Wendland quintic C2
2: Poly6
3: Spiky
4: Precomputed cubic spline (faster than cubic spline)
For a 2D simulation:
0: Cubic spline
1: Wendland quintic C2
CFL:¶
cflMethod (int): CFL method used for adaptive time stepping.
0: No adaptive time stepping
1: Use CFL condition
2: Use CFL condition and consider number of pressure solver iterations
cflFactor (float): Factor to scale the CFL time step size.
cflMinTimeStepSize (float): Min. allowed time step size.
cflMaxTimeStepSize (float): Max. allowed time step size.
FluidBlocks¶
In this part the user can define multiple axis-aligned blocks of fluid particles.
Example code:
"FluidBlocks": [
{
"denseMode": 0,
"start": [-2.0, 0.0, -1],
"end": [-0.5, 1.5, 1],
"translation": [1.0, 0.0, 0.0],
"scale": [1, 1, 1]
}
]
start (vec3): Minimum coordinate of the box which defines the fluid block.
end (vec3): Maximum coordinate of the box which defines the fluid block.
translation (vec3): Translation vector of the block.
scale (vec3): Scaling vector of the block.
denseMode (int):
0: regular sampling
1: more dense sampling
2: dense sampling
initialVelocity (vec3): The initial velocity is set for all particles in the block.
id (string): This id is used in the “Fluid parameter block” (see below) to define the properties of the fluid block. If no id is defined, then the standard id “Fluid” is used.
FluidModels¶
This part can be used to import one or more partio particle files in the scene.
Example code:
"FluidModels": [
{
"particleFile": "../models/bunny.bgeo",
"translation": [-2.0, 0.1, 0.0],
"rotationAxis": [0, 1, 0],
"rotationAngle": 3.14159265359,
"scale": 1
}
]
particleFile (string): Path of the partio file which contains the particle data.
translation (vec3): Translation vector of the fluid model.
scale (vec3): Scaling vector of the fluid model.
rotationAxis (vec3): Axis used to rotate the particle data after loading.
rotationAngle (float): Rotation angle for the initial rotation of the particle data.
id: This id is used in the “Fluid parameter block” (see below) to define the properties of the fluid block. If no id is defined, then the standard id “Fluid” is used.
Emitters¶
In this part the user can define one or more emitters which generate fluid particles.
Example code:
"Emitters": [
{
"width": 5,
"height": 5,
"translation": [-1,0.75,0.0],
"rotationAxis": [0, 1, 0],
"rotationAngle": 3.1415926535897932384626433832795,
"velocity": 2,
"emitStartTime": 2,
"emitEndTime": 6,
"type": 0
}
]
type (int): Defines the shape of the emitter (default: 0).
0: box
1: circle
width (int): Width of the box or radius of the circle emitter in number of particles (default: 5).
height (int): Height of the box in number of particles (is only used for type 0) (default: 5).
translation (vec3): Translation vector of the emitter (default: [0,0,0]).
rotationAxis (vec3): Axis used to rotate the emitter. Note that in 2D simulations the axis is always set to [0,0,1] (default: [0,0,1]).
rotationAngle (float): Rotation angle for the initial rotation of the emitter (default: 0).
velocity (float): Initial velocity of the emitted particles in direction of the emitter (default: 1).
id: This id is used in the “Fluid parameter block” (see below) to define the properties of the fluid block. If no id is defined, then the standard id “Fluid” is used (default: “Fluid”).
emitStartTime (float): Start time of the emitter (default: 0).
emitEndTime (float): End time of the emitter (default: REAL_MAX).
RigidBodies¶
Here, the static and dynamic rigid bodies are defined which define the boundary in the scene. In case of dynamic rigid bodies, the PositionBasedDynamics library is used for their simulation. Note that in this case the PositionBasedDynamics library also reads this json scene files and picks out the relevant parts. That means if you want to define for example a hinge joint or a motor, then just use the json format of PositionBasedDynamics in this scene file.
Example code:
"RigidBodies": [
{
"geometryFile": "../models/UnitBox.obj",
"translation": [0,2,0],
"rotationAxis": [1, 0, 0],
"rotationAngle": 0,
"scale": [2.5, 4, 1.0],
"color": [0.1, 0.4, 0.6, 1.0],
"isDynamic": false,
"isWall": true,
"mapInvert": true,
"mapThickness": 0.0,
"mapResolution": [20,20,20],
"samplingMode": 1
}
]
geometryFile (string): Path to a OBJ file which contains the geometry of the body.
particleFile (string): Path to a partio file which contains a surface sampling of the body. Note that the surface sampling is done automatically if this parameter is missing.
translation (vec3): Translation vector of the rigid body.
scale (vec3): Scaling vector of the rigid body.
rotationAxis (vec3): Axis used to rotate the rigid body after loading.
rotationAngle (float): Rotation angle for the initial rotation of the rigid body.
isDynamic (bool): Defines if the body is static or dynamic.
isWall (bool): Defines if this is a wall. Walls are typically not rendered. This is the only difference.
color (vec4): RGBA color of the body.
mapInvert (bool): Invert the map when using density or volume maps, flips inside/outside (default: false)
mapThickness (float): Additional thickness of a volume or density map (default: 0.0)
mapResolution (vec3): Resolution of a volume or density map (defaut: [20,20,20])
samplingMode (int): Surface sampling mode. 0 Poisson disk sampling, 1 Regular triangle sampling (default: 0).
Materials¶
"Materials": [
{
"id": "Fluid",
"density0": 1000,
"colorField": "velocity",
"colorMapType": 1,
"renderMinValue": 0.0,
"renderMaxValue": 5.0,
"surfaceTension": 0.2,
"surfaceTensionMethod": 0,
"viscosity": 0.01,
"viscosityMethod": 1,
"vorticityMethod": 1,
"vorticity": 0.15,
"viscosityOmega": 0.05,
"inertiaInverse": 0.5,
"maxEmitterParticles": 1000,
"emitterReuseParticles": false,
"emitterBoxMin": [-4.0,-1.0,-4.0],
"emitterBoxMax": [0.0,4,4.0]
}
]
General¶
id (string): Defines the id of the material. You have to give the same id to a FluidBlock, a FluidModel or an Emitter if they should have the defined material behavior.
density0 (float): Rest density of the corresponding fluid.
Particle Coloring¶
colorField (string): Choose vector or scalar field for particle coloring.
colorMapType (int): Selection of a color map for coloring the scalar/vector field.
0: None
1: Jet
2: Plasma
3: CoolWarm
4: BlueWhiteRed
5: Seismic
renderMinValue (float): Minimal value used for color-coding the color field in the rendering process.
renderMaxValue (float): Maximal value used for color-coding the color field in the rendering process.
Viscosity¶
viscosityMethod (int): Viscosity method
0: None
1: Standard
2: XSPH
3: Bender and Koschier 2017
4: Peer et al. 2015
5: Peer et al. 2016
6: Takahashi et al. 2015 (improved)
7: Weiler et al. 2018
viscosity (float): Coefficient for the viscosity force computation
viscoMaxIter (int): (Implicit solvers) Max. iterations of the viscosity solver.
viscoMaxError (float): (Implicit solvers) Max. error of the viscosity solver.
viscoMaxIterOmega (int): (Peer et al. 2016) Max. iterations of the vorticity diffusion solver.
viscoMaxErrorOmega (float): (Peer et al. 2016) Max. error of the vorticity diffusion solver.
viscosityBoundary (float): (Weiler et al. 2018) Coefficient for the viscosity force computation at the boundary.
Vorticity¶
vorticityMethod (int): Vorticity method
0: None
1: Micropolar model
2: Vorticity confinement
vorticity (float): Coefficient for the vorticity force computation
viscosityOmega (float): (Micropolar model) Viscosity coefficient for the angular velocity field.
inertiaInverse (float): (Micropolar model) Inverse microinertia used in the micropolar model.
Drag force¶
dragMethod (int): Drag force method
0: None
1: Macklin et al. 2014
2: Gissler et al. 2017
drag (float): Coefficient for the drag force computation
Surface tension¶
surfaceTensionMethod (int): Surface tension method
0: None
1: Becker & Teschner 2007
2: Akinci et al. 2013
3: He et al. 2014
surfaceTension (float): Coefficient for the surface tension computation
Elasticity¶
elasticityMethod (int): Elasticity method
0: None
1: Becker et al. 2009
2: Peer et al. 2018
youngsModulus (float): Young’s modulus - coefficient for the stiffness of the material (default: 100000.0)
poissonsRatio (float): Poisson’s ratio - measure of the Poisson effect (default: 0.3)
alpha (float): Coefficent for zero-energy modes suppression method (default: 0.0)
elasticityMaxIter (int): (Peer et al. 2018) Maximum solver iterations (default: 100)
elasticityMaxError (float): (Peer et al. 2019) Maximum elasticity error allowed by the solver (default: 1.0e-4)
Emitters¶
maxEmitterParticles (int): Maximum number of particles the emitter generates. Note that reused particles (see below) are not counted here.
emitterReuseParticles (bool): Reuse particles if they are outside of the bounding box defined by emitterBoxMin, emitterBoxMax
emitterBoxMin (vec3): Minimum coordinates of an axis-aligned box (used in combination with emitterReuseParticles)
emitterBoxMax (vec3): Maximum coordinates of an axis-aligned box (used in combination with emitterReuseParticles)
Animation fields¶
In this part the user can define one or more animation fields which animate fluid particles. The user can define math expressions for the components of the field quantity. The typical math terms like cos,sin,… can be used.
Available expression variables:
t: Current time.
dt: Current time step size.
x, y, z: Position of the particle which is in the animation field.
vx, vy, vz: Velocity of the particle which is in the animation field.
valuex, valuey, valuez: Value of the field quantity of the particle which is in the animation field.
Example:
"particleField": "angular velocity",
"expression_x": "valuex + cos(2*t)"
This means that in each step we add cos(2*t) to the x-component of the angular velocity.
Example code:
"AnimationFields": [
{
"particleField": "velocity",
"translation": [-0.5, -0.5, 0],
"rotationAxis": [0, 0, 1],
"rotationAngle": 0.0,
"scale": [0.5, 0.25, 0.8],
"shapeType": 0,
"expression_x": "cos(2*t)*0.1",
"expression_y": "",
"expression_z": ""
}
]
shapeType (int): Defines the shape of the animation field (default: 0).
0: box
1: sphere
2: cylinder
particleField (string): Defines the field quantity that should be modified by the field (e.g. velocity, angular velocity, position) (default: velocity)
translation (vec3): Translation vector of the animation field (default: [0,0,0]).
rotationAxis (vec3): Axis used to rotate the animation field (default: [0,0,1]).
rotationAngle (float): Rotation angle for the initial rotation of the animation field (default: 0).
scale (vec3): Scaling vector of the animation field.
shapeType=0 (box): This vector defines the width, height, depth of the box.
shapeType=1 (sphere): The x-component of the vector defines the radius of the sphere. The other components are ignored.
shapeType=2 (cylinder): The x- and y-component of the vector defines the height and radius of the cylinder, repectively. The z-component is ignored.
expression_x (string): Math expression for the x-component of the field quantity (default=””).
expression_y (string): Math expression for the y-component of the field quantity (default=””).
expression_z (string): Math expression for the z-component of the field quantity (default=””).
Replicability¶
The SPlisHSPlasH library implements the SPH methods developed by our and other research groups (build instructions can be found here). This allows to reproduce the research results of the corresponding publications. Inspired by the Graphics Replicability Stamp Initiative we started to add scenes to the repository to reproduce some of the results in our papers:
Jan Bender, Tassilo Kugelstadt, Marcel Weiler, Dan Koschier, “Implicit Frictional Boundary Handling for SPH”, IEEE Transactions on Visualization and Computer Graphics, 2020
Figure 7.a) can be replicated by loading the scene: data/Scenes/GridModel_Akinci2012.json
Figure 7.b) can be replicated by loading the scene: data/Scenes/GridModel_Bender2019.json
Installation Instructions - Linux¶
Ubuntu Fresh Install¶
Installation List¶
sudo apt install git cmake xorg-dev freeglut3-dev build-essential
Python Bindings¶
If you plan on using the python bindings by specifying -DUSE_PYTHON_BINDINGS=On, then you should also have a working python installation in your path. This installs an additional tool pipx, which allows the installation of packages as executables in virtualized environments.
sudo apt install python3-dev python3-pip python3-venv
python3 -m pip install pipx
python3 -m pipx ensurepath
Alternatively to this you may also install other Python Distributions such as Anaconda (personal preference).
Building Instructions¶
git clone https://github.com/InteractiveComputerGraphics/SPlisHSPlasH.git
cd SPlisHSPlasH
mkdir build && cd build
cmake -DCMAKE_BUILD_TYPE=Release -DUSE_PYTHON_BINDINGS=<On|Off> ..
make -j 4
Run Executable¶
cd ../bin
./SPHSimulator ../data/Scenes/DoubleDamBreak.json
On some systems it may be necessary to define an OpenGL override like so
cd ../bin
MESA_GL_VERSION_OVERRIDE=3.3 ./SPHSimulator ../data/Scenes/DoubleDamBreak.json
The command loads the selected scene. To start the simulation disable the pause mode by clicking the checkbox or pressing [Space]. More hotkeys are listed here.
Using Bindings¶
Assuming that the python bindings were generated in the default location Project Root/build/lib/pysplishsplash.cpython-38-x86_64-linux-gnu.so, you can use the bindings by adding this path to sys.path within your python script, or by calling your scripts within the directory containing the .so file. You can test that the bindings work using the following command.
cd lib
python3 -c "import pysplishsplash"
Installing Bindings¶
If you followed the above instructions for building SPlisHSPlasH using CMake and generated the python bindings, then these commands should work automatically.
Note: You don’t have to clone the repository again. This only shows, that the command should be run in the project root directory. It is also recommended, that you create and activate a virtual environment before installing, so that your base python installation is not affected by any new generated files.
git clone https://github.com/InteractiveComputerGraphics/SPlisHSPlasH.git
cd SPlisHSPlasH
python setup.py bdist_wheel
pip install build/dist/*.whl
If you specified any additional CMake variables in the form of -DVAR_NAME=Value, you can just append them after bdist_wheel
Alternatively you may also run the following command, which essentially combines all of the above commands into a single command.
pip install git+https://github.com/InteractiveComputerGraphics/SPlisHSPlasH.git
Drawbacks: You lose the ability for incremental rebuilds, i.e. if you want to modify the source code and build the bindings anew, you would have to build the entire project every time.
Installation Instructions - Windows¶
Visual Studio¶
Python Bindings¶
If you plan on using the python bindings by specifying -DUSE_PYTHON_BINDINGS=On, then you should also have a working Python installation in your path. Moreover, you require the Python Package Installer (pip).
Building Instructions¶
First, clone the repository by
git clone https://github.com/InteractiveComputerGraphics/SPlisHSPlasH.git
Then run cmake-gui and set “Where is the source code:” to the [SPlisHSPlasH-dir] and “Where to build the binaries:” to [SPlisHSPlasH-dir]/build.
Now run Configure and select the correct Visual Studio version. Ensure that you choose a x64 build on a 64bit system. Finally, run Generate and open the project. Now you can build the project in Visual Studio. Note that you have to select the “Release” build, if you want to have an optimized executable.
Run Executable¶
Execute “bin/SPHSimulator.exe” to start the simulator and select a scene file to run the simulation. Alternatively, you can start the simulation in the command line:
./SPHSimulator ../data/Scenes/DoubleDamBreak.json
The command loads the selected scene. To start the simulation disable the pause mode by clicking the checkbox or pressing [Space]. More hotkeys are listed here.
Using Bindings¶
Assuming that the python bindings were generated in the default location [SPlisHSPlasH-dir]/build/lib/pysplishsplash.cp37-win_amd64.pyd, you can use the bindings by adding this path to sys.path within your python script, or by calling your scripts within the directory containing the .pyd file. You can test that the bindings work using the following command.
cd lib
python3 -c "import pysplishsplash"
Installing Bindings¶
If you followed the above instructions for building SPlisHSPlasH using CMake and generated the python bindings, then these commands should work automatically.
Note: You don’t have to clone the repository again. This only shows, that the command should be run in the project root directory. It is also recommended, that you create and activate a virtual environment before installing, so that your base python installation is not affected by any new generated files.
git clone https://github.com/InteractiveComputerGraphics/SPlisHSPlasH.git
cd SPlisHSPlasH
python setup.py bdist_wheel
pip install build/dist/pySPlisHSPlasH-2.8.3-cp37-cp37m-win_amd64.whl
If you specified any additional CMake variables in the form of -DVAR_NAME=Value, you can just append them after bdist_wheel
Alternatively you may also run the following command, which essentially combines all of the above commands into a single command.
pip install git+https://github.com/InteractiveComputerGraphics/SPlisHSPlasH.git
Drawbacks: You lose the ability for incremental rebuilds, i.e. if you want to modify the source code and build the bindings anew, you would have to build the entire project every time.
CMake Options¶
This page should give you a short overview over the CMake options of SPlisHSPlasH.
USE_DOUBLE_PRECISION¶
If this flag is enabled, then all computations with floating point values are performed using double precision (double). Otherwise single precision (float) is used.
USE_AVX¶
SPlishSPlasH supports the usage of AVX (Advanced Vector Extensions) which is an extension of modern CPUs to perform a single instruction on multiple data. The extension allows to perform eight floating point operations in parallel. Enabling AVX significantly improves the performance of the simulator. Currently, the following methods have AVS support:
DFSPH
the micropolar vorticity model
the standard viscosity model
the viscosity model of Weiler et al.
USE_OpenMP¶
Enable the OpenMP parallelization which lets the simulation run in parallel on all available cores of the CPU.
USE_GPU_NEIGHBORHOOD_SEARCH¶
As default SPlisHSPlasH uses CompactNSearch as neighborhood search which performs all operations on the CPU. However, with this flag you can switch to cuNSearch which is our GPU neighborhood search. In case you want to use the GPU method, you have to install Cuda.
USE_IMGUI¶
We just reimplemented the GUI using imgui instead of AntTweakBar. If you want to try out the new GUI, enable this flag.
USE_PYTHON_BINDINGS¶
Generate a shared library object which can be imported into python scripts and exposes C++ functionality to the python interpreter. Default:On Options:<On|Off>
USE_DEBUG_TOOLS¶
Adds a debug tools tab to the graphical user interface which allows to generate additional particle data for debugging. Note that generating the additional data will slightly decrease the performance of the simulation.
Software Architecture¶
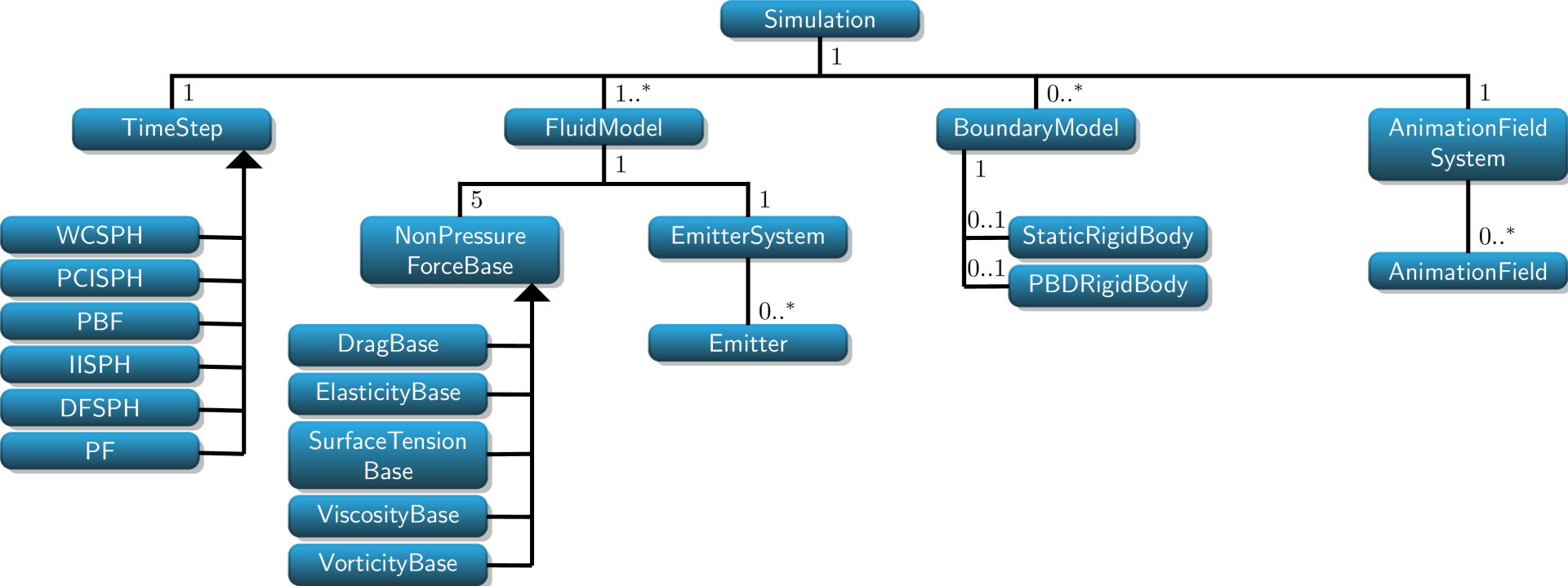
SPlisHSPlasH follows a very intuitive and modular design approach. We want to illustrate part of the software architecture in conjunction with the simplified class diagram above. Note, that this documentation only covers the simulation part of SPlisHSPlasH. The whole software architecture follows a similar design pattern as the Model View Controller.
The Simulation class¶
The simulation class is the main part of the software. It contains the currently used simulation method (TimeStep), all fluids (FluidModel), all boundaries (BoundaryModel), and a AnimationFieldSystem. It is defined as a singleton, thus only one simulation instance exists during the runtime. The simulation instance contains:
exactly one
TimeStepinstance, which defines the simulation loop and contains the pressure solverany number of
FluidModelinstances each defining a different fluid phaseany number of
BoundaryModelinstances representing either dynamic rigid bodies or static boundariesexactly one
AnimationFieldSysteminstance which allows to animate particles in a predefined area
The simulation class also implements the following:
evaluation of the SPH kernel methods
update of the time step size using a CFL condition
uniform invocation of all
EmitterSysteminstancesinvocation of
AnimationFieldSysteminstancesaving & loading the current simulation state
Lastly, the simulation class also contains a well defined interface for the neighborhood search functionalities defined in CompactNSearch or cuNSearch, which are further needed in the respective algorithm implementations in e.g. the TimeStep or NonPressureForces.
The TimeStep class¶
The TimeStep class is a abstract base class for any subsequent derived simulation method one wants to implement. It implements the required interface for the simulation class, noteably the step() function containing the simulation algorithm called in the main loop. During execution there exists exactly one instance of a TimeStep class. By default SPlisHSPlasH currently implements the following pressure solvers and the corresponding simulation algorithms:
WCSPH
PCISPH
PBF
IISPH
DFSPH
Projective Fluids
The FluidModel class¶
A FluidModel instance represents a fluid phase with its respective properties and applied effects to it. SPlisHSPlasH allows for arbitrary many FluidModels inside a simulation as long as there is at least one and they all have a different id (see scene file format). One FluidModel contains the following:
Physical parameters like rest density, mass, position, velocity, acceleration and current density
Simulation parameters like the number of particles, their state and ID
References to the applied non-pressure effects, one for each:
Drag
Elasticity
Surface tension
Viscosity
Vorticity
Emitter systems
Concerning the non-pressure effects, each FluidModel can only utilize up to one method per non-pressure effect, which will be directly included in the computation inside the computeNonPressureForces() method of the Simulation class. Thus having e.g. two different surface tension algorithms inside one FluidModel is not possible. However, it is possible to define e.g. two phases, which have a different viscosity model and only one regarding surface tension effects.
The emitters are only stored inside the FluidModels since they are assigned to a fixed FluidModel. Their functionalities are uniformly executed by the Simulation class in the emitParticles() step usually invoked at the end of the simulation loop of the current TimeStep instance.
The BoundaryModel class¶
The BoundaryModel class provides a useful base class for any boundary handling methods. It stores a RigidBodyObject reference representing the object of the boundary. This can be a stationary or dynamic rigid body, whose coupling effects are handled uniformly. Note that RigidBodyObject is an abstract class providing an interface for the two derived classes StaticRigidBody and PBDRigidBody. The first is handled internally and represent stationary objects. The latter describes a moving rigid body which is simulated externally by the PositionBasedDynamics library. SPlisHSPlasH implements three different boundary models:
Particle-based rigid-fluid coupling [Akinci et al. 2012]
Density maps [Koschier and Bender 2017]
Volume maps [Bender et al. 2019]
Finally, SPlisHSPlasH defines a boundary as a list of rigid bodies in conjunction with a rigid-fluid coupling algorithm.
Implementing a new non-pressure force method¶
Non-pressure forces (e.g. viscosity, vorticity, surface tension or drag forces) are all implemented in the same way in SPlisHSPlasH. In the following we explain the implementation of such a method using as example a new viscosity method.
SPlisHSPlasH organizes the viscosities in /SPlisHSPlasH/Viscosity/ and thus any changes or additions are intended to take place in this directory. The user can add new viscosity methods by creating new or copying and modifying exisiting viscosity class files and registering these inside the build system and the source code.
Creating a new class¶
If you want to create a new viscosity class from scratch, you should consider reading the doxygen documentation on the ViscosityBase class and several of its derived classes. In short, every viscosity method inherits from the base class ViscosityBase, which itself inherits from NonPressureForceBase. A minimal working derived class would look like this:
MyViscosity.h
#ifndef __MyViscosity_h__
#define __MyViscosity_h__
#include "SPlisHSPlasH/Common.h"
#include "SPlisHSPlasH/FluidModel.h"
#include "ViscosityBase.h"
namespace SPH
{
class MyViscosity : public ViscosityBase
{
protected:
virtual void initParameters();
public:
MyViscosity(FluidModel *model);
virtual ~MyViscosity(void);
virtual void step();
virtual void reset();
};
}
#endif
MyViscosity.cpp
#include "MyViscosity.h"
MyViscosity::MyViscosity(FluidModel *model) :
ViscosityBase(model)
{
[...]
}
MyViscosity::~MyViscosity(void)
{
[...]
}
void MyViscosity::initParameters()
{
ViscosityBase::initParameters();
[...]
}
void MyViscosity::step()
{
[...]
}
void MyViscosity::reset()
{
[...]
}
including the following:
a constructor with
FluidModel*as the sole parameterMyViscosity(FluidModel *model)a
initParameters()method calling the base class method for parameter setupa step function
void step()called in each timestep for the associated fluida reset function
void reset()called on every reset of the simulation
Customizing your class¶
The user is also free to add and save additional per particle data inside the viscosity method, but has to ensure that these are also included in the neighborhood search sort. Sorting is required if the data is used over multiple simulations steps. The neighborhood search performs a z-sort every n steps to improve the number of cache hits. Since all particles are resorted, also their data must be resorted. For this, the user has to override the performNeighborhoodSearchSort() method. A minimal example would look like the following:
void MyViscosity::performNeighborhoodSearchSort()
{
Simulation *sim = Simulation::getCurrent();
auto const& d = sim->getNeighborhoodSearch()->point_set(m_model->getPointSetIndex());
d.sort_field(&m_myParticleViscosityData[0]);
}
For visualization and/or debugging purposes, the user may also want to subject the particle data to SPlisHSPlasH’s particle informations. To do this, the user has to add the particle data field to the list of fields inside each FluidModel. This can be for example done in the constructor by adding the addField(const FieldDescription &field) of the corresponding FluidModel. The fields can be used to define the color of a particle, they can be exported to bgeo or ParaView and in the simulator the user can output the field data of the selected particles by pressing “i”.
For more information, please refer to the doxygen documentation and maybe take a look at the already existing implementations. Adding a field has the following form:
model->addField({ "myFieldName", <FieldType>, <lambda expression returning reference to the data field>}, <save state (boolean)>);
Here is an example:
model->addField({ "myFieldName", FieldType::Vector3, [&](const unsigned int i) -> Real* { return &m_myFieldValues[i][0]; }, true });
The field name is used in the GUI and when exporting the data. The boolean at the end determines if this field should be stored when the simulation state is saved. This should only be done if the value is not recomputed in each simulation step so that the value of the last step is required.
Also don’t forget to remove the field, when the instance of the viscosity method is destroyed:
m_model->removeFiledByName("myFieldName");
Registering the viscosity method¶
To add our new viscosity method, we have to integrate it into the build process and the source code.
Adding to the build process¶
Simply add the class files MyViscosity.h and MyViscosity.cpp to the CMakeLists.txt in the /SPlisHSPlasH/ directory. This can be done by adding the relative file paths to the respective variables VISCOSITY_HEADER_FILES and VISCOSITY_SOURCE_FILES:
set(VISCOSITY_HEADER_FILES
[...]
Viscosity/MyViscosity.h
)
set(VISCOSITY_SOURCE_FILES
[...]
Viscosity/MyViscosity.cpp
)
Integration in the source code¶
Any viscosity method is registered in the FluidModel.h and FluidModel.cpp files, which can be found in the /SPlisHSPlasH/ directory. Adding our new viscosity method comprises of the following steps:
adding a new enum element in
ViscosityMethodsfor our methodcreating a new static variable
static int ENUM_VISCOSITY_MYVISCOSITYfor the GenericParameter system and initializing it inFluidModel.cppincluding
Viscosity/MyViscosity.hinFluidModel.cppadding a new enum value for
VISCOSITY_METHODinsideFluidModel::initParameters()using the following line:
enumParam->addEnumValue("MyViscosityName", ENUM_VISCOSITY_MYVISCOSITY);
adding your viscosity method to
FluidModel::setViscosityMethod(), thus making it available for the simulation using the following:
else if (m_viscosityMethod == ViscosityMethods::MyViscosity)
m_viscosity = new MyViscosity(this);
After these additions and building SPlisHSPlasH, our new viscosity method is available inside the simulation.
Creating Pressure Solvers¶
SPlisHSPlasH organizes the pressure solvers in their respective folders inside the /SPlisHSPlasH/ directory. For example DFSPH can be found inside /SPlisHSPlasH/DFSPH/. We highly suggest the user to follow our file organization scheme. The user can also add new pressure solvers by by creating new or copying and modifying existing classes and then adding them to the build system plus additionally registering in the source code.
Note that we do not strictly distinguish the pressure solver from the simulation algorithm. Each TimeStep class implements a whole time step including the pressure solver. The non-pressure forces are decoupled in their respective classes and only implicitly called. Thus for implementing a new pressure solver, we suggest copying the files from for example WCSPH and replacing the pressure solver by your own one. Note further, that we usually decouple data from the algorithm with the SimulationData classes. We strongly recommend doing the same with your implementation.
Creating a new class¶
Again, we want to stress that copying and modifying existent methods is easier than writing a new class from scratch. However, if you want to do so, be sure to implement every abstract method inherited from TimeStep. These include:
void step(), the simulation step functionvoid resize(), a method to initialize and resize any used field
Albeit being not necessary, the user may also want to override/redefine the following methods:
void init(), the initialization method. It is important to callTimeStep::init()inside this methodvoid reset(), the method invoked on every reset commandvoid computeDensities(), if the user does not want to utilize the given density computation
A minimal working example of a derive class is shown below:
TimeStepMyPressureSolver.h
#ifndef __TimeStepMyPressureSolver_h__
#define __TimeStepMyPressureSolver_h__
#include "SPlisHSPlasH/Common.h"
#include "SPlisHSPlasH/TimeStep.h"
#include "SPlisHSPlasH/SPHKernels.h"
namespace SPH
{
class TimeStepMyPressureSolver : public TimeStep
{
public:
TimeStepMyPressureSolver();
virtual ~TimeStepMyPressureSolver();
virtual void step();
virtual void resize();
};
}
#endif
TimeStepMyPressureSolve.cpp
#include "TimeStepMyPressureSolve.h"
using namespace SPH;
using namespace GenParam;
TimeStepMyPressureSolve::TimeStepMyPressureSolve() :
TimeStep()
{
[...]
}
TimeStepMyPressureSolve::~TimeStepMyPressureSolve(void)
{
[...]
}
void TimeStepMyPressureSolve::step()
{
[...]
}
void TimeStepMyPressureSolve::resize()
{
[...]
}
SPlisHSPlasH assumes your simulation method allows for operator splitting, thus usually dividing the simulation into non-pressure forces and the pressure solver plus advection. The latter is subject of the TimeStep class. It is still possible to implement these together inside your own TimeStep class, but it contradicts SPlisHSPlasH’s design principles. Since the step() method is forwarded to the main loop by the simulation class, its purpose is to define the simulation algorithm. For guidance, we also provide a simple SPH simulation algorithm outline:
void TimeStepWCSPH::step()
{
Simulation *sim = Simulation::getCurrent();
const unsigned int nModels = sim->numberOfFluidModels();
TimeManager *tm = TimeManager::getCurrent ();
const Real h = tm->getTimeStepSize();
// 1. Perform a neighborhood search
performNeighborhoodSearch();
// 2. Compute non-pressure forces and SPH densities
for (unsigned int fluidModelIndex = 0; fluidModelIndex < nModels; fluidModelIndex++)
{
clearAccelerations(fluidModelIndex);
computeDensities(fluidModelIndex);
}
sim->computeNonPressureForces();
// 3. Compute pressure forces
computePressureForces();
// 4. Update time step tize with CFL condition
sim->updateTimeStepSize();
// 5. Advect particles
advectParticles();
// 6. Emit and/or animate particles if necessary
sim->emitParticles();
sim->animateParticles();
// 7. Advect time
tm->setTime(tm->getTime() + h);
}
where computeDensities(...) and clearAcceleration(...) are already defined by the base class.
We recommend the user to split the simulation algorithm and its data into two separate classes as it is the case for our already implemented ones.
Registering the pressure solver¶
To add our new simulation method, we have to integrate it into the build process and the source code.
Adding to the build process¶
Simply add all of your class files to the CMakeLists.txt in the /SPlisHSPlasH/ directory. We suggest creating new variables for the header and source files and adding these to the add_library() as well as to new source_group() calls. A possible implementation following our class file conventions would look like the following:
set(MYPRESSURESOLVER_HEADER_FILES
MyPressureSolver/SimulationDataMyPressureSolver.h
MyPressureSolver/TimeStepMyPressureSolver.h
)
set(MYPRESSURESOLVER_SOURCE_FILES
MyPressureSolver/SimulationDataMyPressureSolver.cpp
MyPressureSolver/TimeStepMyPressureSolver.cpp
)
add_library(SPlisHPlasH
[...]
${MYPRESSURESOLVER_HEADER_FILES}
${MYPRESSURESOLVER_SOURCE_FILES}
)
source_group("Header Files\\MyPressureSolver" FILES ${MYPRESSURESOLVER_HEADER_FILES})
source_group("Source Files\\MyPressureSolver" FILES ${MYPRESSURESOLVER_SOURCE_FILES})
Integration in the source code¶
Any timestep method and thus any pressure solver is registered in the Simulation.h and Simulation.cpp files, which can be found in the /SPlisHSPlasH/ directory. Adding a new method comprises of the following steps:
Adding a new enum in
SimulationMethodsCreating a new static variable
static int ENUM_SIMULATION_MYPRESSURESOLVERfor the GenericParameter system and initializing it inSimulation.cppIncluding
SPlisHSPlasH/MyPressureSolver/TimeStepMyPressureSolver.hinSimulation.cppAdding a new enum value for
SIMULATION_METHODinsideSimulation::initParameters()using the following line:
enumParam->addEnumValue("MyPressureSolverName", ENUM_SIMULATION_MYPRESSURESOLVER);
Adding the pressure solver to
Simulation::setSimulationMethod(...), thus making it available for the simulation using the following:
else if (method == SimulationMethods::MyPressureSolver)
{
m_timeStep = new TimeStepMyPressureSolver();
m_timeStep->init();
setValue(Simulation::KERNEL_METHOD, <desired standard SPH kernel>);
setValue(Simulation::GRAD_KERNEL_METHOD, <desired standard SPH gradient kernel>);
}
After these additions and building SPlisHSPlasH, our new pressure solver is available inside the simulation.
Macros¶
SPlisHSPlasH defines useful macros to e.g. iterate over all neighboring particles inside the neighborhood of the current one. These can be found in Simulation.h. In the following, we want to give a short overview over these macros. For further information, please refer to the api documentation.
Looping over fluid neighbors¶
An essential part of SPH computation is to use the properties of neighboring particles to compute the desired value. SPlisHSPlasH provides macros iterating over every fluid neighbor, which can be used like predefined for-loop constructs. These include the following:
forall_fluid_neigbors¶
#define forall_fluid_neighbors(code) \
for (unsigned int pid = 0; pid < nFluids; pid++) \
{ \
FluidModel *fm_neighbor = sim->getFluidModelFromPointSet(pid); \
for (unsigned int j = 0; j < sim->numberOfNeighbors(fluidModelIndex, pid, i); j++) \
{ \
const unsigned int neighborIndex = sim->getNeighbor(fluidModelIndex, pid, i, j); \
const Vector3r &xj = fm_neighbor->getPosition(neighborIndex); \
code \
} \
}
forall_fluid_neigbors loops over every fluid particle (in all fluid phases) in the neighborhood region of the current one. Note that this does not include boundary particles. The user can use this macro by writing the desired code inside the brackets. For the usage of most of the macros, some additional variables have to be predefined. These include in this case:
Simulation *sim = Simulation::getCurrent(), the current simulation instanceunsigned int nFluids, the amount of FluidModel instancesunsigned int fluidModelIndex, the index of the FluidModel of the current particleunsigned int i, the index of the current particle inside the FluidModel with index fluidModelIndex
Further, this macro also defines certain variables, which can be accessed inside the code given to the macro:
unsigned int pid, the index of the FluidModel of the neighboring particleFluidModel *fm_neighbor, the FluidModel reference of the neighboring particleconst unsigned int neighborIndex, the particle index of the neighboring particleconst Vector3r &xj, the position of the neighboring particle
Henceforth, we denote the required additional variables by Requires and the by the macro defined ones by Defines.
forall_fluid_neighbors_in_same_phase¶
#define forall_fluid_neighbors_in_same_phase(code) \
for (unsigned int j = 0; j < sim->numberOfNeighbors(fluidModelIndex, fluidModelIndex, i); j++) \
{ \
const unsigned int neighborIndex = sim->getNeighbor(fluidModelIndex, fluidModelIndex, i, j); \
const Vector3r &xj = model->getPosition(neighborIndex); \
code \
}
forall_fluid_neighbors_in_same_phase loops over every fluid particle in the neighborhood region considering only neighbors from the same FluidModel as the current one.
Requires:
Simulation *sim = Simulation::getCurrent()unsigned int fluidModelIndexunsigned int i
Defines:
const unsigned int neighborIndexconst Vector3r &xj
Looping over boundaries¶
forall_boundary_neighbors¶
#define forall_boundary_neighbors(code) \
for (unsigned int pid = nFluids; pid < sim->numberOfPointSets(); pid++) \
{ \
BoundaryModel_Akinci2012 *bm_neighbor = static_cast<BoundaryModel_Akinci2012*>(sim->getBoundaryModelFromPointSet(pid)); \
for (unsigned int j = 0; j < sim->numberOfNeighbors(fluidModelIndex, pid, i); j++) \
{ \
const unsigned int neighborIndex = sim->getNeighbor(fluidModelIndex, pid, i, j); \
const Vector3r &xj = bm_neighbor->getPosition(neighborIndex); \
code \
} \
}
forall_boundary_neighbors loops over all boundary neighbors casting them to the Akinci 2012 boundary model.
Requires:
Simulation *sim = Simulation::getCurrent()unsigned int nFluidsunsigned int fluidModelIndexunsigned int i
Defines:
unsigned int pid, the index of the FluidModel associated with the BoundaryModelBoundaryModel_Akinci2012 *bm_neighbor, the BoundaryModel reference of the neighboring particleconst unsigned int neighborIndex, the particle index of the neighboring particleconst Vector3r &xj, the position of the neigboring particle
forall_density_maps¶
#define forall_density_maps(code) \
for (unsigned int pid = 0; pid < nBoundaries; pid++) \
{ \
BoundaryModel_Koschier2017 *bm_neighbor = static_cast<BoundaryModel_Koschier2017*>(sim->getBoundaryModel(pid)); \
const Real rho = bm_neighbor->getBoundaryDensity(fluidModelIndex, i); \
if (rho != 0.0) \
{ \
const Vector3r &gradRho = bm_neighbor->getBoundaryDensityGradient(fluidModelIndex, i).cast<Real>(); \
const Vector3r &xj = bm_neighbor->getBoundaryXj(fluidModelIndex, i); \
code \
} \
}
forall_density_maps loops over all boundary neighbors casting them to the Koschier 2017 boundary model.
Requires:
Simulation *sim = Simulation::getCurrent()unsigned int nBoundariesunsigned int fluidModelIndexunsigned int i
Defines:
unsigned int pidBoundaryModel_Koschier2017 *bm_neighborconst Real rho, the boundary density given by the density mapconst Vector3r &gradRho, the boundary density gradientconst Vector3r &xj
forall_volume_maps¶
#define forall_volume_maps(code) \
for (unsigned int pid = 0; pid < nBoundaries; pid++) \
{ \
BoundaryModel_Bender2019 *bm_neighbor = static_cast<BoundaryModel_Bender2019*>(sim->getBoundaryModel(pid)); \
const Real Vj = bm_neighbor->getBoundaryVolume(fluidModelIndex, i); \
if (Vj > 0.0) \
{ \
const Vector3r &xj = bm_neighbor->getBoundaryXj(fluidModelIndex, i); \
code \
} \
}
forall_volume_maps loops over all boundary neighbors casting them to the Bender 2019 boundary model.
Requires:
Simulation *sim = Simulation::getCurrent()unsigned int nBoundariesunsigned int fluidModelIndexunsigned int i
Defines:
unsigned int pidBoundaryModel_Koschier2019 *bm_neighborconst Real Vj, the boundary volume given by the volume mapconst Vector3r &xj
AVX variants¶
SPlisHSPlasH also defines versions using AVX optimizations for some of the macros. These can be used if the respective CMake option is set in the building process. Note that many of the aforementioned by the macro defined variables are given in AVX compatible data types, if you choose to use the AVX version of these macros.
pySPlisHSPlasH¶
Python bindings for the SPlisHSPlasH library¶
Requirements¶
Currently the generation of python bindings is only tested on
Linux Debian, gcc 8.3, Python 3.7/3.8 (Anaconda), CMake 3.13
Windows 10, Visual Studio 15/17/19, Python 3.7/3.8 (Anaconda), CMake 3.13
Note that the compiler, the python installation as well as cmake have to be available from the command line for the installation process to work. MacOS builds should work but have not been tested.
Installation¶
In order to install it is advised that you create a new virtual environment so that any faults during installation can not mess up your python installation. This is done as follows for
conda
conda create --name venv python=3.7
conda activate venv
virtualenv
python3 -m virtualenv venv --python=python3.7
source venv/bin/activate
Now you can clone the repository by
git clone https://github.com/InteractiveComputerGraphics/SPlisHSPlasH.git
And finally you should be able to install SPlisHSPlasH using pip.
The trailing slash is important otherwise pip will try to download the package, which is not supported yet at least.
Also note, that pip install SPlisHSPlasH should be called from one directory above the cloned source directory and not within the directory itself.
pip install SPlisHSPlasH/
While pip install is useful if SPlisHSPlasH should only be installed once, for development purposes it might be more sensible to build differently.
Change into the SPlisHSPlasH directory and build a python wheel file as follows
cd SPlisHSPlasH
python setup.py bdist_wheel
pip install -I build/dist/*.whl
When building a new version of SPlisHSPlasH simply run these commands again and the installation will be updated. The compile times will be lower, because the build files from previous installations remain. If you are getting compile errors please try to compile the pysplishsplash target of the CMake project separately.
Now check your installation by running
python -c "import pysplishsplash"
Note: You may have to install numpy. Future releases may already contain numpy as a dependency.
pip install numpy
I want to see something very very quickly¶
If you’re very impatient, just run the following command after installing
splash
You will be prompted to select a preconfigured scene file which will then be run in a User Interface. For more options and functionality run. The keybindings in the GUI are the same as for the regular SPlisHSPlasH version.
splash --help
Minimal working example¶
The following examples should work, if SPlisHSPlasH was installed correctly. If you want to load other scene files, be sure to place them into the SPlisHSPlasH data directory structure.
With GUI
import pysplishsplash as sph
def main():
base = sph.Exec.SimulatorBase()
base.init()
gui = sph.GUI.Simulator_GUI_TweakBar(base)
base.setGui(gui)
base.run()
if __name__ == "__main__":
main()
Without GUI
import pysplishsplash as sph
def main():
base = sph.Exec.SimulatorBase()
base.init(useGui=False)
base.setValueFloat(base.STOP_AT, 10.0) # Important to have the dot to denote a float
base.run()
if __name__ == "__main__":
main()
Outputting the results to a specific directory without GUI
import pysplishsplash as sph
from pysplishsplash.Extras import Scenes
import os
def main():
base = sph.Exec.SimulatorBase()
output_dir = os.path.abspath("where/you/want/the/data")
base.init(useGui=False, outputDir=output_dir, sceneFile=Scenes.DoubleDamBreak)
base.setValueFloat(base.STOP_AT, 20.0) # Important to have the dot to denote a float
base.setValueBool(base.VTK_EXPORT, True)
# Uncomment the next line to set the output FPS value (must be float)
# base.setValueFloat(base.DATA_EXPORT_FPS, 10000.)
base.run()
if __name__ == "__main__":
main()
SPHSimulator.py¶
If you want to start the simulator in the same way as the C++ version, just use the SPHSimulator.py in the examples directory.
Modifying other properties¶
The bindings cover most of the public interface of the SPlisHSPlasH library. As such, it is possible to change components of the simulation dynamically. In the following example, the second cube in the well known double dam break scenario is replaced with a slightly larger cube.
import pysplishsplash
import pysplishsplash.Utilities.SceneLoaderStructs as Scene
def main():
base = pysplishsplash.Exec.SimulatorBase()
args = base.init()
gui = pysplishsplash.GUI.Simulator_GUI_TweakBar(base)
base.setGui(gui)
scene = base.getScene()
add_block = Scene.FluidBlock('Fluid', Scene.Box([0.0, 0.0, 0.0], [1.0, 1.0, 1.0]), 0, [0.0, 0.0, 0.0])
scene.fluidBlocks[1] = add_block # In Place construction not supported yet
base.run()
if __name__ == "__main__":
main()
Creating Scenes¶
Loading the empty scene¶
Right now the easiest way to create a custom scene without specifying a Scene.json file, is to load the predefined empty scene.
import pysplishsplash as sph
import pysplishsplash.Utilities.SceneLoaderStructs as Scenes
base = sph.Exec.SimulatorBase()
base.init(sceneFile=Scenes.Empty)
This scene will set the default simulation method to be DFSPH and some other default values, which can all be changed later on.
Recreating the double dam break scenario¶
In order to recreate the double dam break scenario, we need to add a bounding box as well as two fluid cubes. The bounding box can be added as follows
scene = base.getScene()
scene.boundaryModels.append(Scenes.BoundaryData(meshFile="../models/UnitBox.obj", translation=[0., 3.0, 0.], scale=[4., 6., 4.], color=[0.1, 0.4, 0.5, 1.0], isWall=True, mapInvert=True, mapResolution=[25, 25, 25]))
The two fluid blocks can at the end be added using
scene.fluidBlocks.append(Scenes.FluidBlock(id='Fluid', box=Scenes.Box([-1.5, 0.0, -1.5], [-0.5, 2.0, -0.5]), mode=0, initialVelocity=[0.0, 0.0, 0.0]))
scene.fluidBlocks.append(Scenes.FluidBlock(id='Fluid', box=Scenes.Box([0.5, 0.0, 0.5], [1.5, 2.0, 1.5]), mode=0, initialVelocity=[0.0, 0.0, 0.0]))
This will recreate a somewhat larger scene than the default double dam break
Putting it all together¶
The following shows a script detailing how to build and run a custom double dam break. Follow the instruction from before to activate/ deactivate the GUI.
import pysplishsplash as sph
import pysplishsplash.Utilities.SceneLoaderStructs as Scenes
def main():
# Set up the simulator
base = sph.Exec.SimulatorBase()
base.init(useGui=True, sceneFile=sph.Extras.Scenes.Empty)
# Create a tweak bar simulator
gui = sph.GUI.Simulator_GUI_TweakBar(base)
base.setGui(gui)
# Get the scene and add objects
scene = base.getScene()
scene.boundaryModels.append(Scenes.BoundaryData(meshFile="../models/UnitBox.obj", translation=[0., 3.0, 0.], scale=[4., 6., 4.], color=[0.1, 0.4, 0.5, 1.0], isWall=True, mapInvert=True, mapResolution=[25, 25, 25]))
scene.fluidBlocks.append(Scenes.FluidBlock(id='Fluid', box=Scenes.Box([-1.5, 0.0, -1.5], [-0.5, 2.0, -0.5]), mode=0, initialVelocity=[0.0, 0.0, 0.0]))
scene.fluidBlocks.append(Scenes.FluidBlock(id='Fluid', box=Scenes.Box([0.5, 0.0, 0.5], [1.5, 2.0, 1.5]), mode=0, initialVelocity=[0.0, 0.0, 0.0]))
# Run the GUI
base.run()
if __name__ == "__main__":
main()
Loading a scene from file¶
Loading a scene from a file is as simple as simply specifying a custom scene file in the init function. This must be an absolute path!
custom_scene = os.path.abspath("scene.json")
base.init(sceneFile=custom_scene)
If you want to use a gui to locate the scene file you may want to use tkinter
import tkinter as tk
from tkinter import filedialog
tk.Tk().withdraw() # Dont show main window
custom_scene = filedialog.askopenfilename()
base.init(sceneFile=custom_scene)
Restrictions¶
When modifying simulation parameters this is the recommended structure, as modification will only work after
base.initSimulation()has been called.
base.initSimulation()
sim = sph.Simulation.getCurrent()
sim.setValue...()
base.runSimulation()
base.cleanup()
setValue...()andgetValue...()functions cannot accept vectors as arguments yet
Library API¶
Class Hierarchy¶
-
- Namespace Eigen
- Namespace Eigen::internal
- Namespace SPH
- Struct FieldDescription
- Class AdhesionKernel
- Class AnimationField
- Class AnimationFieldSystem
- Class BinaryFileReader
- Class BinaryFileWriter
- Class BlockJacobiPreconditioner3D
- Class BoundaryModel
- Class BoundaryModel_Akinci2012
- Class BoundaryModel_Bender2019
- Class BoundaryModel_Koschier2017
- Class CohesionKernel
- Class CubicKernel
- Class CubicKernel2D
- Class DebugTools
- Class DragBase
- Class DragForce_Gissler2017
- Class DragForce_Macklin2014
- Class Elasticity_Becker2009
- Class Elasticity_Peer2018
- Class ElasticityBase
- Class Emitter
- Class EmitterSystem
- Class FluidModel
- Class GaussQuadrature
- Class JacobiPreconditioner1D
- Class JacobiPreconditioner3D
- Class MathFunctions
- Class MatrixReplacement
- Class MicropolarModel_Bender2017
- Class NonPressureForceBase
- Class PoissonDiskSampling
- Class Poly6Kernel
- Template Class PrecomputedKernel
- Class RegularSampling2D
- Class RegularTriangleSampling
- Class RigidBodyObject
- Class SimpleQuadrature
- Class Simulation
- Class SimulationDataDFSPH
- Class SimulationDataIISPH
- Class SimulationDataPBF
- Class SimulationDataPCISPH
- Class SimulationDataPF
- Class SimulationDataWCSPH
- Class SpikyKernel
- Class StaticRigidBody
- Class SurfaceTension_Akinci2013
- Class SurfaceTension_Becker2007
- Class SurfaceTension_He2014
- Class SurfaceTensionBase
- Class TimeIntegration
- Class TimeManager
- Class TimeStep
- Class TimeStepDFSPH
- Class TimeStepIISPH
- Class TimeStepPBF
- Class TimeStepPCISPH
- Class TimeStepPF
- Class TimeStepWCSPH
- Class TriangleMesh
- Class Viscosity_Bender2017
- Class Viscosity_Peer2015
- Class Viscosity_Peer2016
- Class Viscosity_Standard
- Class Viscosity_Takahashi2015
- Class Viscosity_Weiler2018
- Class Viscosity_XSPH
- Class ViscosityBase
- Class VorticityBase
- Class VorticityConfinement
- Class WendlandQuinticC2Kernel
- Class WendlandQuinticC2Kernel2D
- Enum BoundaryHandlingMethods
- Enum DragMethods
- Enum ElasticityMethods
- Enum FieldType
- Enum ParticleState
- Enum SimulationMethods
- Enum SurfaceSamplingMode
- Enum SurfaceTensionMethods
- Enum ViscosityMethods
- Enum VorticityMethods
- Namespace Utilities
- Struct AverageCount
- Struct AverageTime
- Struct MeshFaceIndices
- Struct TimingHelper
- Class ConsoleSink
- Class Counting
- Class FileSink
- Class FileSystem
- Class IDFactory
- Class Logger
- Class LogSink
- Class LogStream
- Class OBJLoader
- Class PartioReaderWriter
- Class SceneLoader
- Struct SceneLoader::AnimationFieldData
- Struct SceneLoader::BoundaryData
- Struct SceneLoader::Box
- Struct SceneLoader::EmitterData
- Struct SceneLoader::FluidBlock
- Struct SceneLoader::FluidData
- Struct SceneLoader::MaterialData
- Struct SceneLoader::Scene
- Class SDFFunctions
- Class StringTools
- Class SystemInfo
- Class Timing
- Class VolumeSampling
- Class WindingNumbers
- Enum LogLevel
- Class Matrix3f8
- Class Quaternion8f
- Class Scalarf8
- Class Vector3f8
- Namespace Eigen
File Hierarchy¶
-
- Directory SPlisHSPlasH
- File AnimationField.cpp
- File AnimationField.h
- File AnimationFieldSystem.cpp
- File AnimationFieldSystem.h
- File BoundaryModel.cpp
- File BoundaryModel.h
- File BoundaryModel_Akinci2012.cpp
- File BoundaryModel_Akinci2012.h
- File BoundaryModel_Bender2019.cpp
- File BoundaryModel_Bender2019.h
- File BoundaryModel_Koschier2017.cpp
- File BoundaryModel_Koschier2017.h
- File Common.h
- File Emitter.cpp
- File Emitter.h
- File EmitterSystem.cpp
- File EmitterSystem.h
- File FluidModel.cpp
- File FluidModel.h
- File NeighborhoodSearch.h
- File NonPressureForceBase.cpp
- File NonPressureForceBase.h
- File RigidBodyObject.h
- File Simulation.cpp
- File Simulation.h
- File SPHKernels.cpp
- File SPHKernels.h
- File StaticRigidBody.h
- File TimeManager.cpp
- File TimeManager.h
- File TimeStep.cpp
- File TimeStep.h
- File TriangleMesh.cpp
- File TriangleMesh.h
- Directory Utilities
- File BinaryFileReaderWriter.h
- File Counting.h
- File FileSystem.h
- File Logger.h
- File OBJLoader.h
- File PartioReaderWriter.cpp
- File PartioReaderWriter.h
- File StringTools.h
- File SystemInfo.h
- File Timing.h
- File AVX_math.h
- File DebugTools.cpp
- File DebugTools.h
- File DragBase.cpp
- File DragBase.h
- File DragForce_Gissler2017.cpp
- File DragForce_Gissler2017.h
- File DragForce_Macklin2014.cpp
- File DragForce_Macklin2014.h
- File Elasticity_Becker2009.cpp
- File Elasticity_Becker2009.h
- File Elasticity_Peer2018.cpp
- File Elasticity_Peer2018.h
- File ElasticityBase.cpp
- File ElasticityBase.h
- File GaussQuadrature.cpp
- File GaussQuadrature.h
- File MathFunctions.cpp
- File MathFunctions.h
- File MatrixFreeSolver.h
- File MicropolarModel_Bender2017.cpp
- File MicropolarModel_Bender2017.h
- File PoissonDiskSampling.cpp
- File PoissonDiskSampling.h
- File RegularSampling2D.cpp
- File RegularSampling2D.h
- File RegularTriangleSampling.cpp
- File RegularTriangleSampling.h
- File SceneLoader.cpp
- File SceneLoader.h
- File SDFFunctions.cpp
- File SDFFunctions.h
- File SimpleQuadrature.cpp
- File SimpleQuadrature.h
- File SimulationDataDFSPH.cpp
- File SimulationDataDFSPH.h
- File SimulationDataIISPH.cpp
- File SimulationDataIISPH.h
- File SimulationDataPBF.cpp
- File SimulationDataPBF.h
- File SimulationDataPCISPH.cpp
- File SimulationDataPCISPH.h
- File SimulationDataPF.cpp
- File SimulationDataPF.h
- File SimulationDataWCSPH.cpp
- File SimulationDataWCSPH.h
- File SurfaceSampling.h
- File SurfaceTension_Akinci2013.cpp
- File SurfaceTension_Akinci2013.h
- File SurfaceTension_Becker2007.cpp
- File SurfaceTension_Becker2007.h
- File SurfaceTension_He2014.cpp
- File SurfaceTension_He2014.h
- File SurfaceTensionBase.cpp
- File SurfaceTensionBase.h
- File TimeIntegration.cpp
- File TimeIntegration.h
- File TimeStepDFSPH.cpp
- File TimeStepDFSPH.h
- File TimeStepIISPH.cpp
- File TimeStepIISPH.h
- File TimeStepPBF.cpp
- File TimeStepPBF.h
- File TimeStepPCISPH.cpp
- File TimeStepPCISPH.h
- File TimeStepPF.cpp
- File TimeStepPF.h
- File TimeStepWCSPH.cpp
- File TimeStepWCSPH.h
- File Viscosity_Bender2017.cpp
- File Viscosity_Bender2017.h
- File Viscosity_Peer2015.cpp
- File Viscosity_Peer2015.h
- File Viscosity_Peer2016.cpp
- File Viscosity_Peer2016.h
- File Viscosity_Standard.cpp
- File Viscosity_Standard.h
- File Viscosity_Takahashi2015.cpp
- File Viscosity_Takahashi2015.h
- File Viscosity_Weiler2018.cpp
- File Viscosity_Weiler2018.h
- File Viscosity_XSPH.cpp
- File Viscosity_XSPH.h
- File ViscosityBase.cpp
- File ViscosityBase.h
- File VolumeSampling.cpp
- File VolumeSampling.h
- File VorticityBase.cpp
- File VorticityBase.h
- File VorticityConfinement.cpp
- File VorticityConfinement.h
- File WindingNumbers.cpp
- File WindingNumbers.h
- Directory SPlisHSPlasH
Full API¶
Namespaces¶
Namespace @54¶
Namespace Eigen::internal¶
Contents
Namespace GenParam¶
Namespace std¶
Classes and Structs¶
Template Struct generic_product_impl< MatrixReplacement, Rhs, SparseShape, DenseShape, GemvProduct >¶
Defined in File MatrixFreeSolver.h
Inheritance Relationships¶
Base Type¶
public generic_product_impl_base< MatrixReplacement, Rhs, generic_product_impl< MatrixReplacement, Rhs > >
Struct Documentation¶
Template Struct traits< SPH::MatrixReplacement >¶
Defined in File MatrixFreeSolver.h
Struct Documentation¶
-
template<>
structtraits<SPH::MatrixReplacement> : public Eigen::internal::traits<SystemMatrixType>¶
Struct PoissonDiskSampling::CellPosHasher¶
Defined in File PoissonDiskSampling.h
Nested Relationships¶
This struct is a nested type of Class PoissonDiskSampling.
Struct Documentation¶
-
struct
SPH::PoissonDiskSampling::CellPosHasher¶ Public Functions
-
std::size_t
operator()(const CellPos &k) const¶
-
std::size_t
Struct PoissonDiskSampling::HashEntry¶
Defined in File PoissonDiskSampling.h
Nested Relationships¶
This struct is a nested type of Class PoissonDiskSampling.
Struct Documentation¶
-
struct
SPH::PoissonDiskSampling::HashEntry Struct to store the hash entry (spatial hashing)
Public Functions
-
HashEntry()
Public Members
-
std::vector<unsigned int>
samples
-
unsigned int
startIndex
-
Struct PoissonDiskSampling::InitialPointInfo¶
Defined in File PoissonDiskSampling.h
Nested Relationships¶
This struct is a nested type of Class PoissonDiskSampling.
Struct Documentation¶
-
struct
SPH::PoissonDiskSampling::InitialPointInfo Struct to store the information of the initial points.
Struct SceneLoader::AnimationFieldData¶
Defined in File SceneLoader.h
Nested Relationships¶
This struct is a nested type of Class SceneLoader.
Struct SceneLoader::BoundaryData¶
Defined in File SceneLoader.h
Nested Relationships¶
This struct is a nested type of Class SceneLoader.
Struct Documentation¶
-
struct
Utilities::SceneLoader::BoundaryData Struct to store a boundary object.
Public Members
-
std::string
samplesFile
-
std::string
meshFile
-
Vector3r
translation
-
Matrix3r
rotation
-
Vector3r
scale
-
Real
density
-
bool
dynamic
-
bool
isWall
-
Eigen::Matrix<float, 4, 1, Eigen::DontAlign>
color
-
void *
rigidBody
-
std::string
mapFile
-
bool
mapInvert
-
Real
mapThickness
-
Eigen::Matrix<unsigned int, 3, 1, Eigen::DontAlign>
mapResolution
-
unsigned int
samplingMode
-
std::string
Struct SceneLoader::Box¶
Defined in File SceneLoader.h
Nested Relationships¶
This struct is a nested type of Class SceneLoader.
Struct Documentation¶
-
struct
Utilities::SceneLoader::Box Struct for an AABB.
Struct SceneLoader::EmitterData¶
Defined in File SceneLoader.h
Nested Relationships¶
This struct is a nested type of Class SceneLoader.
Struct SceneLoader::FluidBlock¶
Defined in File SceneLoader.h
Nested Relationships¶
This struct is a nested type of Class SceneLoader.
Struct Documentation¶
-
struct
Utilities::SceneLoader::FluidBlock Struct to store a fluid block.
Struct SceneLoader::FluidData¶
Defined in File SceneLoader.h
Nested Relationships¶
This struct is a nested type of Class SceneLoader.
Struct Documentation¶
-
struct
Utilities::SceneLoader::FluidData Struct to store a fluid object.
Struct SceneLoader::MaterialData¶
Defined in File SceneLoader.h
Nested Relationships¶
This struct is a nested type of Class SceneLoader.
Struct Documentation¶
-
struct
Utilities::SceneLoader::MaterialData Struct to store particle coloring information.
Struct SceneLoader::Scene¶
Defined in File SceneLoader.h
Nested Relationships¶
This struct is a nested type of Class SceneLoader.
Struct Documentation¶
-
struct
Utilities::SceneLoader::Scene Struct to store scene information.
Public Members
-
std::vector<BoundaryData*>
boundaryModels
-
std::vector<FluidData*>
fluidModels
-
std::vector<FluidBlock*>
fluidBlocks
-
std::vector<EmitterData*>
emitters
-
std::vector<AnimationFieldData*>
animatedFields
-
std::vector<MaterialData*>
materials
-
Real
particleRadius
-
bool
sim2D
-
Real
timeStepSize
-
Vector3r
camPosition
-
Vector3r
camLookat
-
std::vector<BoundaryData*>
Class Quaternion8f¶
Defined in File AVX_math.h
Class Documentation¶
-
class
Quaternion8f¶ Public Functions
-
Quaternion8f()¶
-
const Quaternion8f
operator*(const Quaternion8f &a) const¶
-
void
store(std::vector<Quaternionr> &qf) const¶
-
void
set(const std::vector<Quaternionr> &qf)¶
-
Class AdhesionKernel¶
Defined in File SPHKernels.h
Class Documentation¶
-
class
SPH::AdhesionKernel¶ Adhesion kernel used for the surface tension method of Akinci el al. [ATT13].
References:
[AAT13] Nadir Akinci, Gizem Akinci, and Matthias Teschner. Versatile surface tension and adhesion for sph fluids. ACM Trans. Graph., 32(6):182:1-182:8, November 2013. URL: http://doi.acm.org/10.1145/2508363.2508395
Public Static Functions
Class AnimationField¶
Defined in File AnimationField.h
Class Documentation¶
-
class
SPH::AnimationField¶ Public Functions
-
AnimationField(const std::string &particleFieldName, const Vector3r &pos, const Matrix3r &rotation, const Vector3r &scale, const std::string expression[3], const unsigned int type = 0)¶
-
~AnimationField()¶
-
void
step()¶
-
void
reset()¶
Protected Functions
-
FORCE_INLINE bool inBox (const Vector3r &x, const Vector3r &xBox, const Matrix3r &rotBox, const Vector3r &scaleBox)
-
FORCE_INLINE bool inCylinder (const Vector3r &x, const Vector3r &xCyl, const Matrix3r &rotCyl, const Real h, const Real r2)
-
FORCE_INLINE bool inSphere (const Vector3r &x, const Vector3r &pos, const Matrix3r &rot, const Real radius)
-
FORCE_INLINE bool inShape (const int type, const Vector3r &x, const Vector3r &pos, const Matrix3r &rot, const Vector3r &scale)
-
Class AnimationFieldSystem¶
Defined in File AnimationFieldSystem.h
Class Documentation¶
-
class
SPH::AnimationFieldSystem¶ Public Functions
-
AnimationFieldSystem()¶
-
~AnimationFieldSystem()¶
-
void
addAnimationField(const std::string &particleFieldName, const Vector3r &pos, const Matrix3r &rotation, const Vector3r &scale, const std::string expression[3], const unsigned int type)¶
-
unsigned int
numAnimationFields() const¶
-
std::vector<AnimationField*> &
getAnimationFields()¶
-
void
step()¶
-
void
reset()¶
Protected Attributes
-
std::vector<AnimationField*>
m_fields¶
-
Class BinaryFileWriter¶
Defined in File BinaryFileReaderWriter.h
Class BlockJacobiPreconditioner3D¶
Defined in File MatrixFreeSolver.h
Class Documentation¶
-
class
SPH::BlockJacobiPreconditioner3D¶ Matrix-free 3x3 block Jacobi preconditioner
Public Types
-
typedef SystemMatrixType::StorageIndex
StorageIndex¶
Public Functions
-
BlockJacobiPreconditioner3D()¶
-
void
init(const unsigned int dim, DiagonalMatrixElementFct fct, void *userData)¶
-
Eigen::Index
rows() const¶
-
Eigen::Index
cols() const¶
-
Eigen::ComputationInfo
info()¶
-
template<typename
MatType>
BlockJacobiPreconditioner3D &analyzePattern(const MatType&)¶
-
template<typename
MatType>
BlockJacobiPreconditioner3D &factorize(const MatType &mat)¶
-
template<typename
MatType>
BlockJacobiPreconditioner3D &compute(const MatType &mat)¶
-
template<typename
Rhs>
const Eigen::Solve<BlockJacobiPreconditioner3D, Rhs>solve(const Eigen::MatrixBase<Rhs> &b) const¶
-
typedef SystemMatrixType::StorageIndex
Class BoundaryModel¶
Defined in File BoundaryModel.h
Inheritance Relationships¶
Derived Types¶
public SPH::BoundaryModel_Akinci2012(Class BoundaryModel_Akinci2012)public SPH::BoundaryModel_Bender2019(Class BoundaryModel_Bender2019)public SPH::BoundaryModel_Koschier2017(Class BoundaryModel_Koschier2017)
Class Documentation¶
-
class
SPH::BoundaryModel¶ The boundary model stores the information required for boundary handling.
Subclassed by SPH::BoundaryModel_Akinci2012, SPH::BoundaryModel_Bender2019, SPH::BoundaryModel_Koschier2017
Public Functions
-
BoundaryModel()¶
-
~BoundaryModel()¶
-
void
reset()¶
-
void
performNeighborhoodSearchSort()¶
-
void
saveState(BinaryFileWriter &binWriter)¶
-
void
loadState(BinaryFileReader &binReader)¶
-
RigidBodyObject *
getRigidBodyObject()¶
-
FORCE_INLINE void addForce (const Vector3r &pos, const Vector3r &f)
-
FORCE_INLINE void getPointVelocity (const Vector3r &x, Vector3r &res)
-
void
clearForceAndTorque()¶
-
Class BoundaryModel_Akinci2012¶
Defined in File BoundaryModel_Akinci2012.h
Inheritance Relationships¶
Base Type¶
public SPH::BoundaryModel(Class BoundaryModel)
Class Documentation¶
-
class
SPH::BoundaryModel_Akinci2012: public SPH::BoundaryModel¶ The boundary model stores the information required for boundary handling using the approach of Akinci et al. 2012 [AIA+12].
References:
[AIA+12] Nadir Akinci, Markus Ihmsen, Gizem Akinci, Barbara Solenthaler, and Matthias Teschner. Versatile rigid-fluid coupling for incompressible SPH. ACM Trans. Graph., 31(4):62:1-62:8, July 2012. URL: http://doi.acm.org/10.1145/2185520.2185558
Public Functions
-
BoundaryModel_Akinci2012()¶
-
~BoundaryModel_Akinci2012()¶
-
unsigned int
numberOfParticles() const¶
-
unsigned int
getPointSetIndex() const¶
-
void
computeBoundaryVolume()¶
-
void
resize(const unsigned int numBoundaryParticles)¶
-
void
reset()¶
-
void
performNeighborhoodSearchSort()¶
-
void
saveState(BinaryFileWriter &binWriter)¶
-
void
loadState(BinaryFileReader &binReader)¶
-
void
initModel(RigidBodyObject *rbo, const unsigned int numBoundaryParticles, Vector3r *boundaryParticles)¶
-
FORCE_INLINE Vector3r & getPosition0 (const unsigned int i)
-
FORCE_INLINE const Vector3r & getPosition0 (const unsigned int i) const
-
FORCE_INLINE void setPosition0 (const unsigned int i, const Vector3r &pos)
-
FORCE_INLINE Vector3r & getPosition (const unsigned int i)
-
FORCE_INLINE const Vector3r & getPosition (const unsigned int i) const
-
FORCE_INLINE void setPosition (const unsigned int i, const Vector3r &pos)
-
FORCE_INLINE Vector3r & getVelocity (const unsigned int i)
-
FORCE_INLINE const Vector3r & getVelocity (const unsigned int i) const
-
FORCE_INLINE void setVelocity (const unsigned int i, const Vector3r &vel)
-
FORCE_INLINE const Real & getVolume (const unsigned int i) const
-
FORCE_INLINE Real & getVolume (const unsigned int i)
-
FORCE_INLINE void setVolume (const unsigned int i, const Real &val)
Class BoundaryModel_Bender2019¶
Defined in File BoundaryModel_Bender2019.h
Inheritance Relationships¶
Base Type¶
public SPH::BoundaryModel(Class BoundaryModel)
Class Documentation¶
-
class
SPH::BoundaryModel_Bender2019: public SPH::BoundaryModel¶ The boundary model stores the information required for boundary handling using the approach of Bender et al. 2019 [BKWK19].
References:
[BKWK19] Jan Bender, Tassilo Kugelstadt, Marcel Weiler, and Dan Koschier. Volume maps: an implicit boundary representation for SPH. In Proceedings of ACM SIGGRAPH Conference on Motion, Interaction and Games, MIG ‘19. ACM, 2019. URL: https://dl.acm.org/doi/10.1145/3359566.3360077
Public Functions
-
BoundaryModel_Bender2019()¶
-
~BoundaryModel_Bender2019()¶
-
void
initModel(RigidBodyObject *rbo)¶
-
void
reset()¶
-
Discregrid::DiscreteGrid *
getMap()¶
-
void
setMap(Discregrid::DiscreteGrid *map)¶
-
FORCE_INLINE const Real & getBoundaryVolume (const unsigned int fluidIndex, const unsigned int i) const
-
FORCE_INLINE Real & getBoundaryVolume (const unsigned int fluidIndex, const unsigned int i)
-
FORCE_INLINE void setBoundaryVolume (const unsigned int fluidIndex, const unsigned int i, const Real &val)
-
FORCE_INLINE Vector3r & getBoundaryXj (const unsigned int fluidIndex, const unsigned int i)
-
FORCE_INLINE const Vector3r & getBoundaryXj (const unsigned int fluidIndex, const unsigned int i) const
-
FORCE_INLINE void setBoundaryXj (const unsigned int fluidIndex, const unsigned int i, const Vector3r &val)
Class BoundaryModel_Koschier2017¶
Defined in File BoundaryModel_Koschier2017.h
Inheritance Relationships¶
Base Type¶
public SPH::BoundaryModel(Class BoundaryModel)
Class Documentation¶
-
class
SPH::BoundaryModel_Koschier2017: public SPH::BoundaryModel¶ The boundary model stores the information required for boundary handling using the approach of Koschier and Bender 2017 [KB17].
References:
[KB17] Dan Koschier and Jan Bender. Density maps for improved SPH boundary handling. In ACM SIGGRAPH/Eurographics Symposium on Computer Animation, 1-10. July 2017. URL: http://dx.doi.org/10.1145/3099564.3099565
Public Functions
-
BoundaryModel_Koschier2017()¶
-
~BoundaryModel_Koschier2017()¶
-
void
initModel(RigidBodyObject *rbo)¶
-
void
reset()¶
-
Discregrid::DiscreteGrid *
getMap()¶
-
void
setMap(Discregrid::DiscreteGrid *map)¶
-
FORCE_INLINE const Real & getBoundaryDensity (const unsigned int fluidIndex, const unsigned int i) const
-
FORCE_INLINE Real & getBoundaryDensity (const unsigned int fluidIndex, const unsigned int i)
-
FORCE_INLINE void setBoundaryDensity (const unsigned int fluidIndex, const unsigned int i, const Real &val)
-
FORCE_INLINE Vector3r & getBoundaryDensityGradient (const unsigned int fluidIndex, const unsigned int i)
-
FORCE_INLINE const Vector3r & getBoundaryDensityGradient (const unsigned int fluidIndex, const unsigned int i) const
-
FORCE_INLINE void setBoundaryDensityGradient (const unsigned int fluidIndex, const unsigned int i, const Vector3r &val)
-
FORCE_INLINE Vector3r & getBoundaryXj (const unsigned int fluidIndex, const unsigned int i)
-
FORCE_INLINE const Vector3r & getBoundaryXj (const unsigned int fluidIndex, const unsigned int i) const
-
FORCE_INLINE void setBoundaryXj (const unsigned int fluidIndex, const unsigned int i, const Vector3r &val)
Class CohesionKernel¶
Defined in File SPHKernels.h
Class Documentation¶
-
class
SPH::CohesionKernel¶ Cohesion kernel used for the surface tension method of Akinci el al. [ATT13].
References:
[AAT13] Nadir Akinci, Gizem Akinci, and Matthias Teschner. Versatile surface tension and adhesion for sph fluids. ACM Trans. Graph., 32(6):182:1-182:8, November 2013. URL: http://doi.acm.org/10.1145/2508363.2508395
Class DebugTools¶
Defined in File DebugTools.h
Class Documentation¶
-
class
SPH::DebugTools: public ParameterObject¶ Public Functions
-
DebugTools()¶
-
~DebugTools()¶
-
void
init()¶
-
void
cleanup()¶
-
void
step()¶
-
void
reset()¶
-
void
performNeighborhoodSearchSort()¶
-
void
emittedParticles(FluidModel *model, const unsigned int startIndex)¶
Public Static Attributes
-
int
DETERMINE_THREAD_IDS= -1¶
-
int
DETERMINE_NUM_NEIGHBORS= -1¶
-
int
DETERMINE_VELOCITY_CHANGES= -1¶
Protected Functions
-
void
initParameters()¶
-
void
determineThreadIds()¶
-
void
determineNumNeighbors()¶
-
void
determineVelocityChanges()¶
-
Class DragBase¶
Defined in File DragBase.h
Inheritance Relationships¶
Base Type¶
public SPH::NonPressureForceBase(Class NonPressureForceBase)
Derived Types¶
public SPH::DragForce_Gissler2017(Class DragForce_Gissler2017)public SPH::DragForce_Macklin2014(Class DragForce_Macklin2014)
Class Documentation¶
-
class
SPH::DragBase: public SPH::NonPressureForceBase¶ Base class for all drag force methods.
Subclassed by SPH::DragForce_Gissler2017, SPH::DragForce_Macklin2014
Public Static Attributes
-
int
DRAG_COEFFICIENT= -1¶
Protected Functions
-
void
initParameters()¶
-
int
Class DragForce_Gissler2017¶
Defined in File DragForce_Gissler2017.h
Inheritance Relationships¶
Base Type¶
public SPH::DragBase(Class DragBase)
Class Documentation¶
-
class
SPH::DragForce_Gissler2017: public SPH::DragBase¶ This class implements the drag force computation introduced by Gissler et al. [GBP+17].
References:
[GPB+17] Christoph Gissler, Stefan Band, Andreas Peer, Markus Ihmsen, and Matthias Teschner. Approximate air-fluid interactions for SPH. In Virtual Reality Interactions and Physical Simulations, 1-10. April 2017. URL: http://dx.doi.org/10.2312/vriphys.20171081
Public Functions
-
DragForce_Gissler2017(FluidModel *model)¶
-
~DragForce_Gissler2017(void)¶
-
void
step()¶
-
void
reset()¶
Protected Attributes
Class DragForce_Macklin2014¶
Defined in File DragForce_Macklin2014.h
Inheritance Relationships¶
Base Type¶
public SPH::DragBase(Class DragBase)
Class Documentation¶
-
class
SPH::DragForce_Macklin2014: public SPH::DragBase¶ This class implements the drag force computation introduced by Macklin et al. [MMCK14].
References:
[MMCK14] Miles Macklin, Matthias Müller, Nuttapong Chentanez, and Tae-Yong Kim. Unified Particle Physics for Real-Time Applications. ACM Trans. Graph., 33(4):1-12, 2014. URL: http://doi.acm.org/10.1145/2601097.2601152
Public Functions
-
DragForce_Macklin2014(FluidModel *model)¶
-
~DragForce_Macklin2014(void)¶
-
void
step()¶
-
void
reset()¶
Class Elasticity_Becker2009¶
Defined in File Elasticity_Becker2009.h
Inheritance Relationships¶
Base Type¶
public SPH::ElasticityBase(Class ElasticityBase)
Class Documentation¶
-
class
SPH::Elasticity_Becker2009: public SPH::ElasticityBase¶ This class implements the corotated SPH method for deformable solids introduced by Becker et al. [BIT09].
References:
[BIT09] Markus Becker, Markus Ihmsen, and Matthias Teschner. Corotated SPH for deformable solids. In Proceedings of Eurographics Conference on Natural Phenomena, 27-34. 2009. URL: http://dx.doi.org/10.2312EG/DL/conf/EG2009/nph/027-034
Public Functions
-
Elasticity_Becker2009(FluidModel *model)¶
-
~Elasticity_Becker2009(void)¶
-
void
step()¶
-
void
reset()¶
-
void
performNeighborhoodSearchSort()¶
-
void
saveState(BinaryFileWriter &binWriter)¶
-
void
loadState(BinaryFileReader &binReader)¶
Public Static Attributes
-
int
ALPHA= -1¶
Protected Functions
-
void
initValues()¶
-
void
computeRotations()¶
-
void
computeStress()¶
-
void
computeForces()¶
-
void
initParameters()¶
-
FORCE_INLINE void symMatTimesVec (const Vector6r &M, const Vector3r &v, Vector3r &res)
Class Elasticity_Peer2018¶
Defined in File Elasticity_Peer2018.h
Inheritance Relationships¶
Base Type¶
public SPH::ElasticityBase(Class ElasticityBase)
Class Documentation¶
-
class
SPH::Elasticity_Peer2018: public SPH::ElasticityBase¶ This class implements the implicit SPH formulation for incompressible linearly elastic solids introduced by Peer et al. [PGBT17].
References:
[PGBT17] Andreas Peer, Christoph Gissler, Stefan Band, and Matthias Teschner. An implicit SPH formulation for incompressible linearly elastic solids. Computer Graphics Forum, 2017. URL: http://dx.doi.org/10.1111/cgf.13317
Public Functions
-
Elasticity_Peer2018(FluidModel *model)¶
-
~Elasticity_Peer2018(void)¶
-
void
step()¶
-
void
reset()¶
-
void
performNeighborhoodSearchSort()¶
-
void
saveState(BinaryFileWriter &binWriter)¶
-
void
loadState(BinaryFileReader &binReader)¶
Public Static Attributes
-
int
ITERATIONS= -1¶
-
int
MAX_ITERATIONS= -1¶
-
int
MAX_ERROR= -1¶
-
int
ALPHA= -1¶
Protected Types
-
typedef Eigen::ConjugateGradient<MatrixReplacement, Eigen::Lower | Eigen::Upper, Eigen::IdentityPreconditioner>
Solver¶
Protected Functions
-
void
initValues()¶
-
void
computeMatrixL()¶
-
void
computeRotations()¶
-
void
computeRHS(VectorXr &rhs)¶
-
void
initParameters()¶
-
FORCE_INLINE void symMatTimesVec (const Vector6r &M, const Vector3r &v, Vector3r &res)
Class ElasticityBase¶
Defined in File ElasticityBase.h
Inheritance Relationships¶
Base Type¶
public SPH::NonPressureForceBase(Class NonPressureForceBase)
Derived Types¶
public SPH::Elasticity_Becker2009(Class Elasticity_Becker2009)public SPH::Elasticity_Peer2018(Class Elasticity_Peer2018)
Class Documentation¶
-
class
SPH::ElasticityBase: public SPH::NonPressureForceBase¶ Base class for all elasticity methods.
Subclassed by SPH::Elasticity_Becker2009, SPH::Elasticity_Peer2018
Protected Functions
-
void
initParameters()¶
-
void
Class Emitter¶
Defined in File Emitter.h
Class Documentation¶
-
class
SPH::Emitter¶ Public Functions
-
Emitter(FluidModel *model, const unsigned int width, const unsigned int height, const Vector3r &pos, const Matrix3r &rotation, const Real velocity, const unsigned int type = 0)¶
-
~Emitter()¶
-
void
emitParticles(std::vector<unsigned int> &reusedParticles, unsigned int &indexReuse, unsigned int &numEmittedParticles)¶
-
void
emitParticlesCircle(std::vector<unsigned int> &reusedParticles, unsigned int &indexReuse, unsigned int &numEmittedParticles)¶
-
void
step(std::vector<unsigned int> &reusedParticles, unsigned int &indexReuse, unsigned int &numEmittedParticles)¶
-
void
reset()¶
-
void
saveState(BinaryFileWriter &binWriter)¶
-
void
loadState(BinaryFileReader &binReader)¶
Protected Functions
-
FORCE_INLINE bool inBox (const Vector3r &x, const Vector3r &xBox, const Matrix3r &rotBox, const Vector3r &scaleBox)
-
FORCE_INLINE bool inCylinder (const Vector3r &x, const Vector3r &xCyl, const Matrix3r &rotCyl, const Real h, const Real r2)
-
Class EmitterSystem¶
Defined in File EmitterSystem.h
Class Documentation¶
-
class
SPH::EmitterSystem¶ Public Functions
-
EmitterSystem(FluidModel *model)¶
-
~EmitterSystem()¶
-
void
enableReuseParticles(const Vector3r &boxMin = Vector3r(-1, -1, -1), const Vector3r &boxMax = Vector3r(1, 1, 1))¶
-
void
disableReuseParticles()¶
-
void
addEmitter(const unsigned int width, const unsigned int height, const Vector3r &pos, const Matrix3r &rotation, const Real velocity, const unsigned int type)¶
-
unsigned int
numEmitters() const¶
-
unsigned int
numReusedParticles() const¶
-
unsigned int
numEmittedParticles() const¶
-
void
step()¶
-
void
reset()¶
-
void
saveState(BinaryFileWriter &binWriter)¶
-
void
loadState(BinaryFileReader &binReader)¶
Protected Functions
-
void
reuseParticles()¶
Protected Attributes
-
FluidModel *
m_model¶
-
bool
m_reuseParticles¶
-
unsigned int
m_numberOfEmittedParticles¶
-
unsigned int
m_numReusedParticles¶
-
std::vector<unsigned int>
m_reusedParticles¶
Protected Static Attributes
-
const unsigned int
m_maxParticlesToReusePerStep= 50000¶
-
Class FluidModel¶
Defined in File FluidModel.h
Class Documentation¶
-
class
SPH::FluidModel: public ParameterObject¶ The fluid model stores the particle and simulation information.
Public Functions
-
FluidModel()¶
-
FluidModel(const FluidModel&) = delete¶
-
FluidModel &
operator=(const FluidModel&) = delete¶
-
~FluidModel()¶
-
void
init()¶
-
std::string
getId() const¶
-
FORCE_INLINE Real getDensity0 () const
-
unsigned int
getPointSetIndex() const¶
-
void
addField(const FieldDescription &field)¶
-
const std::vector<FieldDescription> &
getFields()¶
-
const FieldDescription &
getField(const unsigned int i)¶
-
const FieldDescription &
getField(const std::string &name)¶
-
const unsigned int
numberOfFields()¶
-
void
removeFieldByName(const std::string &fieldName)¶
-
void
setNumActiveParticles(const unsigned int num)¶
-
unsigned int
numberOfParticles() const¶
-
EmitterSystem *
getEmitterSystem()¶
-
void
reset()¶
-
void
performNeighborhoodSearchSort()¶
-
void
initModel(const std::string &id, const unsigned int nFluidParticles, Vector3r *fluidParticles, Vector3r *fluidVelocities, const unsigned int nMaxEmitterParticles)¶
-
const unsigned int
numParticles() const¶
-
unsigned int
numActiveParticles() const¶
-
unsigned int
getNumActiveParticles0() const¶
-
void
setNumActiveParticles0(unsigned int val)¶
-
void
emittedParticles(const unsigned int startIndex)¶
-
int
getSurfaceTensionMethod() const¶
-
void
setSurfaceTensionMethod(const int val)¶
-
int
getViscosityMethod() const¶
-
void
setViscosityMethod(const int val)¶
-
int
getVorticityMethod() const¶
-
void
setVorticityMethod(const int val)¶
-
int
getDragMethod() const¶
-
void
setDragMethod(const int val)¶
-
int
getElasticityMethod() const¶
-
void
setElasticityMethod(const int val)¶
-
SurfaceTensionBase *
getSurfaceTensionBase()¶
-
ViscosityBase *
getViscosityBase()¶
-
VorticityBase *
getVorticityBase()¶
-
ElasticityBase *
getElasticityBase()¶
-
void
setDragMethodChangedCallback(std::function<void()> const &callBackFct)¶
-
void
setSurfaceMethodChangedCallback(std::function<void()> const &callBackFct)¶
-
void
setViscosityMethodChangedCallback(std::function<void()> const &callBackFct)¶
-
void
setVorticityMethodChangedCallback(std::function<void()> const &callBackFct)¶
-
void
setElasticityMethodChangedCallback(std::function<void()> const &callBackFct)¶
-
void
computeSurfaceTension()¶
-
void
computeViscosity()¶
-
void
computeVorticity()¶
-
void
computeDragForce()¶
-
void
computeElasticity()¶
-
void
saveState(BinaryFileWriter &binWriter)¶
-
void
loadState(BinaryFileReader &binReader)¶
-
FORCE_INLINE Vector3r & getPosition0 (const unsigned int i)
-
FORCE_INLINE const Vector3r & getPosition0 (const unsigned int i) const
-
FORCE_INLINE void setPosition0 (const unsigned int i, const Vector3r &pos)
-
FORCE_INLINE Vector3r & getPosition (const unsigned int i)
-
FORCE_INLINE const Vector3r & getPosition (const unsigned int i) const
-
FORCE_INLINE void setPosition (const unsigned int i, const Vector3r &pos)
-
FORCE_INLINE Vector3r & getVelocity (const unsigned int i)
-
FORCE_INLINE const Vector3r & getVelocity (const unsigned int i) const
-
FORCE_INLINE void setVelocity (const unsigned int i, const Vector3r &vel)
-
FORCE_INLINE Vector3r & getVelocity0 (const unsigned int i)
-
FORCE_INLINE const Vector3r & getVelocity0 (const unsigned int i) const
-
FORCE_INLINE void setVelocity0 (const unsigned int i, const Vector3r &vel)
-
FORCE_INLINE Vector3r & getAcceleration (const unsigned int i)
-
FORCE_INLINE const Vector3r & getAcceleration (const unsigned int i) const
-
FORCE_INLINE void setAcceleration (const unsigned int i, const Vector3r &accel)
-
FORCE_INLINE const Real getMass (const unsigned int i) const
-
FORCE_INLINE Real & getMass (const unsigned int i)
-
FORCE_INLINE void setMass (const unsigned int i, const Real mass)
-
FORCE_INLINE const Real & getDensity (const unsigned int i) const
-
FORCE_INLINE Real & getDensity (const unsigned int i)
-
FORCE_INLINE void setDensity (const unsigned int i, const Real &val)
-
FORCE_INLINE unsigned int & getParticleId (const unsigned int i)
-
FORCE_INLINE const unsigned int & getParticleId (const unsigned int i) const
-
FORCE_INLINE const ParticleState & getParticleState (const unsigned int i) const
-
FORCE_INLINE ParticleState & getParticleState (const unsigned int i)
-
FORCE_INLINE void setParticleState (const unsigned int i, const ParticleState &val)
-
FORCE_INLINE const Real getVolume (const unsigned int i) const
-
FORCE_INLINE Real & getVolume (const unsigned int i)
Public Static Attributes
-
int
NUM_PARTICLES= -1¶
-
int
NUM_REUSED_PARTICLES= -1¶
-
int
DENSITY0= -1¶
-
int
DRAG_METHOD= -1¶
-
int
SURFACE_TENSION_METHOD= -1¶
-
int
VISCOSITY_METHOD= -1¶
-
int
VORTICITY_METHOD= -1¶
-
int
ELASTICITY_METHOD= -1¶
-
int
ENUM_DRAG_NONE= -1¶
-
int
ENUM_DRAG_MACKLIN2014= -1¶
-
int
ENUM_DRAG_GISSLER2017= -1¶
-
int
ENUM_SURFACETENSION_NONE= -1¶
-
int
ENUM_SURFACETENSION_BECKER2007= -1¶
-
int
ENUM_SURFACETENSION_AKINCI2013= -1¶
-
int
ENUM_SURFACETENSION_HE2014= -1¶
-
int
ENUM_VISCOSITY_NONE= -1¶
-
int
ENUM_VISCOSITY_STANDARD= -1¶
-
int
ENUM_VISCOSITY_XSPH= -1¶
-
int
ENUM_VISCOSITY_BENDER2017= -1¶
-
int
ENUM_VISCOSITY_PEER2015= -1¶
-
int
ENUM_VISCOSITY_PEER2016= -1¶
-
int
ENUM_VISCOSITY_TAKAHASHI2015= -1¶
-
int
ENUM_VISCOSITY_WEILER2018= -1¶
-
int
ENUM_VORTICITY_NONE= -1¶
-
int
ENUM_VORTICITY_MICROPOLAR= -1¶
-
int
ENUM_VORTICITY_VC= -1¶
-
int
ENUM_ELASTICITY_NONE= -1¶
-
int
ENUM_ELASTICITY_BECKER2009= -1¶
-
int
ENUM_ELASTICITY_PEER2018= -1¶
Protected Functions
-
void
initParameters()¶
-
void
initMasses()¶
-
void
resizeFluidParticles(const unsigned int newSize)¶ Resize the arrays containing the particle data.
-
void
releaseFluidParticles()¶ Release the arrays containing the particle data.
Protected Attributes
-
std::string
m_id¶
-
EmitterSystem *
m_emitterSystem¶
-
std::vector<unsigned int>
m_particleId¶
-
std::vector<ParticleState>
m_particleState¶
-
SurfaceTensionMethods
m_surfaceTensionMethod¶
-
SurfaceTensionBase *
m_surfaceTension¶
-
ViscosityMethods
m_viscosityMethod¶
-
ViscosityBase *
m_viscosity¶
-
VorticityMethods
m_vorticityMethod¶
-
VorticityBase *
m_vorticity¶
-
DragMethods
m_dragMethod¶
-
ElasticityMethods
m_elasticityMethod¶
-
ElasticityBase *
m_elasticity¶
-
std::vector<FieldDescription>
m_fields¶
-
std::function<void()>
m_dragMethodChanged¶
-
std::function<void()>
m_surfaceTensionMethodChanged¶
-
std::function<void()>
m_viscosityMethodChanged¶
-
std::function<void()>
m_vorticityMethodChanged¶
-
std::function<void()>
m_elasticityMethodChanged¶
-
unsigned int
m_pointSetIndex¶
-
unsigned int
m_numActiveParticles¶
-
unsigned int
m_numActiveParticles0¶
-
Class GaussQuadrature¶
Defined in File GaussQuadrature.h
Class JacobiPreconditioner1D¶
Defined in File MatrixFreeSolver.h
Class Documentation¶
-
class
SPH::JacobiPreconditioner1D¶ Matrix-free Jacobi preconditioner
Public Types
-
typedef SystemMatrixType::StorageIndex
StorageIndex¶
Public Functions
-
JacobiPreconditioner1D()¶
-
void
init(const unsigned int dim, DiagonalMatrixElementFct fct, void *userData)¶
-
Eigen::Index
rows() const¶
-
Eigen::Index
cols() const¶
-
Eigen::ComputationInfo
info()¶
-
template<typename
MatType>
JacobiPreconditioner1D &analyzePattern(const MatType&)¶
-
template<typename
MatType>
JacobiPreconditioner1D &factorize(const MatType &mat)¶
-
template<typename
MatType>
JacobiPreconditioner1D &compute(const MatType &mat)¶
-
template<typename
Rhs>
const Eigen::Solve<JacobiPreconditioner1D, Rhs>solve(const Eigen::MatrixBase<Rhs> &b) const¶
Protected Attributes
-
unsigned int
m_dim¶
-
DiagonalMatrixElementFct
m_diagonalElementFct¶ diagonal matrix element callback
-
void *
m_userData¶
-
VectorXr
m_invDiag¶
-
typedef SystemMatrixType::StorageIndex
Class JacobiPreconditioner3D¶
Defined in File MatrixFreeSolver.h
Class Documentation¶
-
class
SPH::JacobiPreconditioner3D¶ Matrix-free Jacobi preconditioner
Public Types
-
typedef SystemMatrixType::StorageIndex
StorageIndex¶
Public Functions
-
JacobiPreconditioner3D()¶
-
void
init(const unsigned int dim, DiagonalMatrixElementFct fct, void *userData)¶
-
Eigen::Index
rows() const¶
-
Eigen::Index
cols() const¶
-
Eigen::ComputationInfo
info()¶
-
template<typename
MatType>
JacobiPreconditioner3D &analyzePattern(const MatType&)¶
-
template<typename
MatType>
JacobiPreconditioner3D &factorize(const MatType &mat)¶
-
template<typename
MatType>
JacobiPreconditioner3D &compute(const MatType &mat)¶
-
template<typename
Rhs>
const Eigen::Solve<JacobiPreconditioner3D, Rhs>solve(const Eigen::MatrixBase<Rhs> &b) const¶
Protected Attributes
-
unsigned int
m_dim¶
-
DiagonalMatrixElementFct
m_diagonalElementFct¶ diagonal matrix element callback
-
void *
m_userData¶
-
VectorXr
m_invDiag¶
-
typedef SystemMatrixType::StorageIndex
Class MathFunctions¶
Defined in File MathFunctions.h
Class Documentation¶
-
class
SPH::MathFunctions¶ Public Static Functions
-
void
extractRotation(const Matrix3r &A, Quaternionr &q, const unsigned int maxIter)¶ Implementation of the paper:
Matthias Müller, Jan Bender, Nuttapong Chentanez and Miles Macklin, “A Robust Method to Extract the Rotational Part of Deformations”, ACM SIGGRAPH Motion in Games, 2016
-
void
svdWithInversionHandling(const Matrix3r &A, Vector3r &sigma, Matrix3r &U, Matrix3r &VT)¶ Perform a singular value decomposition of matrix A: A = U * sigma * V^T. This function returns two proper rotation matrices U and V^T which do not contain a reflection. Reflections are corrected by the inversion handling proposed by Irving et al. 2004.
-
void
Class MatrixReplacement¶
Defined in File MatrixFreeSolver.h
Class Documentation¶
-
class
SPH::MatrixReplacement: public Eigen::EigenBase<MatrixReplacement>¶ Replacement of the matrix in the linear system which is required for a matrix-free solver.
Public Types
-
enum [anonymous]¶
Values:
-
enumerator
ColsAtCompileTime¶
-
enumerator
MaxColsAtCompileTime¶
-
enumerator
IsRowMajor¶
-
enumerator
-
typedef int
StorageIndex¶
Public Functions
-
Index
rows() const¶
-
Index
cols() const¶
-
template<typename
Rhs>
Eigen::Product<MatrixReplacement, Rhs, Eigen::AliasFreeProduct>operator*(const Eigen::MatrixBase<Rhs> &x) const¶
-
MatrixReplacement(const unsigned int dim, MatrixVecProdFct fct, void *userData)¶
-
void *
getUserData()¶
-
MatrixVecProdFct
getMatrixVecProdFct()¶
Protected Attributes
-
unsigned int
m_dim¶
-
void *
m_userData¶
-
MatrixVecProdFct
m_matrixVecProdFct¶ matrix vector product callback
-
enum [anonymous]¶
Class MicropolarModel_Bender2017¶
Defined in File MicropolarModel_Bender2017.h
Inheritance Relationships¶
Base Type¶
public SPH::VorticityBase(Class VorticityBase)
Class Documentation¶
-
class
SPH::MicropolarModel_Bender2017: public SPH::VorticityBase¶ This class implements the micropolar material model introduced by Bender et al. [BKKW17].
References:
[BKKW17] Jan Bender, Dan Koschier, Tassilo Kugelstadt, and Marcel Weiler. A micropolar material model for turbulent SPH fluids. In ACM SIGGRAPH / Eurographics Symposium on Computer Animation, SCA ‘17. ACM, 2017. URL: http://doi.acm.org/10.1145/3099564.3099578
Public Functions
-
MicropolarModel_Bender2017(FluidModel *model)¶
-
~MicropolarModel_Bender2017(void)¶
-
void
step()¶
-
void
reset()¶
-
void
performNeighborhoodSearchSort()¶
-
FORCE_INLINE const Vector3r & getAngularAcceleration (const unsigned int i) const
-
FORCE_INLINE Vector3r & getAngularAcceleration (const unsigned int i)
-
FORCE_INLINE void setAngularAcceleration (const unsigned int i, const Vector3r &val)
-
FORCE_INLINE const Vector3r & getAngularVelocity (const unsigned int i) const
-
FORCE_INLINE Vector3r & getAngularVelocity (const unsigned int i)
-
FORCE_INLINE void setAngularVelocity (const unsigned int i, const Vector3r &val)
Protected Functions
-
void
initParameters()¶
Class NonPressureForceBase¶
Defined in File NonPressureForceBase.h
Inheritance Relationships¶
Base Type¶
public ParameterObject
Derived Types¶
public SPH::DragBase(Class DragBase)public SPH::ElasticityBase(Class ElasticityBase)public SPH::SurfaceTensionBase(Class SurfaceTensionBase)public SPH::ViscosityBase(Class ViscosityBase)public SPH::VorticityBase(Class VorticityBase)
Class Documentation¶
-
class
SPH::NonPressureForceBase: public ParameterObject¶ Base class for all non-pressure force methods.
Subclassed by SPH::DragBase, SPH::ElasticityBase, SPH::SurfaceTensionBase, SPH::ViscosityBase, SPH::VorticityBase
Public Functions
-
NonPressureForceBase(FluidModel *model)¶
-
NonPressureForceBase(const NonPressureForceBase&) = delete¶
-
NonPressureForceBase &
operator=(const NonPressureForceBase&) = delete¶
-
~NonPressureForceBase(void)¶
-
void
step() = 0¶
-
void
reset()¶
-
void
performNeighborhoodSearchSort()¶
-
void
emittedParticles(const unsigned int startIndex)¶
-
void
saveState(BinaryFileWriter &binWriter)¶
-
void
loadState(BinaryFileReader &binReader)¶
-
FluidModel *
getModel()¶
-
void
init()¶
Protected Attributes
-
FluidModel *
m_model¶
-
Class PoissonDiskSampling¶
Defined in File PoissonDiskSampling.h
Nested Relationships¶
Class Documentation¶
-
class
SPH::PoissonDiskSampling¶ This class implements a Poisson disk sampling for the surface of 3D models.
Public Functions
-
PoissonDiskSampling()¶
-
void
sampleMesh(const unsigned int numVertices, const Vector3r *vertices, const unsigned int numFaces, const unsigned int *faces, const Real minRadius, const unsigned int numTrials, unsigned int distanceNorm, std::vector<Vector3r> &samples)¶ Performs the poisson sampling with the respective parameters. Compare http://graphics.cs.umass.edu/pubs/sa_2010.pdf
- Parameters
mesh: mesh data of sampled bodyvertices: vertex data of sampled datasampledVertices: sampled vertices that will be returnedminRadius: minimal distance of sampled verticesnumTestpointsPerFace: # of generated test points per face of bodydistanceNorm: 0: euclidean norm, 1: approx geodesic distancenumTrials: # of iterations used to find samples
Public Static Functions
-
FORCE_INLINE int floor (const Real v)
-
struct
InitialPointInfo¶ Struct to store the information of the initial points.
-
Class Poly6Kernel¶
Defined in File SPHKernels.h
Class Documentation¶
-
class
SPH::Poly6Kernel¶ Poly6 kernel.
Template Class PrecomputedKernel¶
Defined in File SPHKernels.h
Class Documentation¶
-
template<typename
KernelType, unsigned intresolution= 10000u>
classSPH::PrecomputedKernel¶ Precomputed kernel which is based on a lookup table as described by Bender and Koschier [BK15,BK17].
The lookup tables can be used in combination with any kernel.
References:
[BK15] Jan Bender and Dan Koschier. Divergence-free smoothed particle hydrodynamics. In ACM SIGGRAPH / Eurographics Symposium on Computer Animation, SCA ‘15, 147-155. New York, NY, USA, 2015. ACM. URL: http://doi.acm.org/10.1145/2786784.2786796
[BK17] Jan Bender and Dan Koschier. Divergence-free SPH for incompressible and viscous fluids. IEEE Transactions on Visualization and Computer Graphics, 23(3):1193-1206, 2017. URL: http://dx.doi.org/10.1109/TVCG.2016.2578335
Public Static Functions
Class RegularSampling2D¶
Defined in File RegularSampling2D.h
Class Documentation¶
-
class
SPH::RegularSampling2D¶ This class implements a per-triangle regular sampling for the surface of 3D models.
Public Functions
-
RegularSampling2D()¶
Public Static Functions
-
void
sampleMesh(const Matrix3r &rotation, const Vector3r &translation, const unsigned numVertices, const Vector3r *vertices, const unsigned int numFaces, const unsigned int *faces, const Real maxDistance, std::vector<Vector3r> &samples)¶ Performs the poisson sampling with the respective parameters. Compare http://graphics.cs.umass.edu/pubs/sa_2010.pdf
- Parameters
rotation: rotation of the meshtranslation: translation of the meshnumVertices: number of mesh verticesvertices: vertex data of sampled datanumFaces: number of faces in the meshfaces: face data of sampled meshmaxDistance: maximal distance of sampled verticessamples: vector to store the samples
-
Class RegularTriangleSampling¶
Defined in File RegularTriangleSampling.h
Class Documentation¶
-
class
SPH::RegularTriangleSampling¶ This class implements a per-triangle regular sampling for the surface of 3D models.
Public Functions
-
RegularTriangleSampling()¶
Public Static Functions
-
void
sampleMesh(const unsigned int numVertices, const Vector3r *vertices, const unsigned int numFaces, const unsigned int *faces, const Real maxDistance, std::vector<Vector3r> &samples)¶ Performs the poisson sampling with the respective parameters. Compare http://graphics.cs.umass.edu/pubs/sa_2010.pdf
- Parameters
numVertices: number of mesh verticesvertices: vertex data of sampled datanumFaces: number of faces in the meshfaces: face data of sampled meshmaxDistance: maximal distance of sampled verticessamples: vector to store the samples
-
Class RigidBodyObject¶
Defined in File RigidBodyObject.h
Inheritance Relationships¶
Derived Type¶
public SPH::StaticRigidBody(Class StaticRigidBody)
Class SimpleQuadrature¶
Defined in File SimpleQuadrature.h
Class Documentation¶
Class Simulation¶
Defined in File Simulation.h
Class Documentation¶
-
class
SPH::Simulation: public ParameterObject¶ Class to manage the current simulation time and the time step size. This class is a singleton.
Public Types
-
typedef PrecomputedKernel<CubicKernel, 10000>
PrecomputedCubicKernel¶
Public Functions
-
Simulation()¶
-
Simulation(const Simulation&) = delete¶
-
Simulation &
operator=(const Simulation&) = delete¶
-
~Simulation()¶
-
void
reset()¶
-
void
addFluidModel(const std::string &id, const unsigned int nFluidParticles, Vector3r *fluidParticles, Vector3r *fluidVelocities, const unsigned int nMaxEmitterParticles)¶
-
FluidModel *
getFluidModel(const unsigned int index)¶
-
FluidModel *
getFluidModelFromPointSet(const unsigned int pointSetIndex)¶
-
const unsigned int
numberOfFluidModels() const¶
-
void
addBoundaryModel(BoundaryModel *bm)¶
-
BoundaryModel *
getBoundaryModel(const unsigned int index)¶
-
BoundaryModel *
getBoundaryModelFromPointSet(const unsigned int pointSetIndex)¶
-
const unsigned int
numberOfBoundaryModels() const¶
-
void
updateBoundaryVolume()¶
-
AnimationFieldSystem *
getAnimationFieldSystem()¶
-
BoundaryHandlingMethods
getBoundaryHandlingMethod() const¶
-
void
setBoundaryHandlingMethod(BoundaryHandlingMethods val)¶
-
int
getKernel() const¶
-
void
setKernel(int val)¶
-
int
getGradKernel() const¶
-
void
setGradKernel(int val)¶
-
FORCE_INLINE Real W_zero () const
-
FORCE_INLINE Real W (const Vector3r &r) const
-
FORCE_INLINE Vector3r gradW (const Vector3r &r)
-
int
getSimulationMethod() const¶
-
void
setSimulationMethod(const int val)¶
-
void
setSimulationMethodChangedCallback(std::function<void()> const &callBackFct)¶
-
bool
is2DSimulation()¶
-
bool
zSortEnabled()¶
-
void
updateTimeStepSize()¶ Update time step size depending on the chosen method.
-
void
updateTimeStepSizeCFL()¶ Update time step size by CFL condition.
-
void
performNeighborhoodSearch()¶ Perform the neighborhood search for all fluid particles.
-
void
performNeighborhoodSearchSort()¶
-
void
computeNonPressureForces()¶
-
void
animateParticles()¶
-
void
emitParticles()¶
-
void
emittedParticles(FluidModel *model, const unsigned int startIndex)¶
-
NeighborhoodSearch *
getNeighborhoodSearch()¶
-
void
saveState(BinaryFileWriter &binWriter)¶
-
void
loadState(BinaryFileReader &binReader)¶
-
FORCE_INLINE unsigned int numberOfPointSets () const
-
FORCE_INLINE unsigned int numberOfNeighbors (const unsigned int pointSetIndex, const unsigned int neighborPointSetIndex, const unsigned int index) const
-
FORCE_INLINE unsigned int getNeighbor (const unsigned int pointSetIndex, const unsigned int neighborPointSetIndex, const unsigned int index, const unsigned int k) const
-
FORCE_INLINE const unsigned int * getNeighborList (const unsigned int pointSetIndex, const unsigned int neighborPointSetIndex, const unsigned int index) const
Public Static Functions
-
Simulation *
getCurrent()¶
-
void
setCurrent(Simulation *tm)¶
-
bool
hasCurrent()¶
Public Static Attributes
-
int
SIM_2D= -1¶
-
int
PARTICLE_RADIUS= -1¶
-
int
GRAVITATION= -1¶
-
int
CFL_METHOD= -1¶
-
int
CFL_FACTOR= -1¶
-
int
CFL_MIN_TIMESTEPSIZE= -1¶
-
int
CFL_MAX_TIMESTEPSIZE= -1¶
-
int
ENABLE_Z_SORT= -1¶
-
int
KERNEL_METHOD= -1¶
-
int
GRAD_KERNEL_METHOD= -1¶
-
int
ENUM_KERNEL_CUBIC= -1¶
-
int
ENUM_KERNEL_WENDLANDQUINTICC2= -1¶
-
int
ENUM_KERNEL_POLY6= -1¶
-
int
ENUM_KERNEL_SPIKY= -1¶
-
int
ENUM_KERNEL_PRECOMPUTED_CUBIC= -1¶
-
int
ENUM_KERNEL_CUBIC_2D= -1¶
-
int
ENUM_KERNEL_WENDLANDQUINTICC2_2D= -1¶
-
int
ENUM_GRADKERNEL_CUBIC= -1¶
-
int
ENUM_GRADKERNEL_WENDLANDQUINTICC2= -1¶
-
int
ENUM_GRADKERNEL_POLY6= -1¶
-
int
ENUM_GRADKERNEL_SPIKY= -1¶
-
int
ENUM_GRADKERNEL_PRECOMPUTED_CUBIC= -1¶
-
int
ENUM_GRADKERNEL_CUBIC_2D= -1¶
-
int
ENUM_GRADKERNEL_WENDLANDQUINTICC2_2D= -1¶
-
int
SIMULATION_METHOD= -1¶
-
int
ENUM_CFL_NONE= -1¶
-
int
ENUM_CFL_STANDARD= -1¶
-
int
ENUM_CFL_ITER= -1¶
-
int
ENUM_SIMULATION_WCSPH= -1¶
-
int
ENUM_SIMULATION_PCISPH= -1¶
-
int
ENUM_SIMULATION_PBF= -1¶
-
int
ENUM_SIMULATION_IISPH= -1¶
-
int
ENUM_SIMULATION_DFSPH= -1¶
-
int
ENUM_SIMULATION_PF= -1¶
-
int
BOUNDARY_HANDLING_METHOD= -1¶
-
int
ENUM_AKINCI2012= -1¶
-
int
ENUM_KOSCHIER2017= -1¶
-
int
ENUM_BENDER2019= -1¶
Protected Functions
-
void
initParameters()¶
Protected Attributes
-
std::vector<FluidModel*>
m_fluidModels¶
-
std::vector<BoundaryModel*>
m_boundaryModels¶
-
NeighborhoodSearch *
m_neighborhoodSearch¶
-
AnimationFieldSystem *
m_animationFieldSystem¶
-
int
m_cflMethod¶
-
int
m_kernelMethod¶
-
int
m_gradKernelMethod¶
-
SimulationMethods
m_simulationMethod¶
-
bool
m_sim2D¶
-
bool
m_enableZSort¶
-
std::function<void()>
m_simulationMethodChanged¶
-
int
m_boundaryHandlingMethod¶
-
typedef PrecomputedKernel<CubicKernel, 10000>
Class SimulationDataDFSPH¶
Defined in File SimulationDataDFSPH.h
Class Documentation¶
-
class
SPH::SimulationDataDFSPH¶ Simulation data which is required by the method Divergence-free Smoothed Particle Hydrodynamics introduced by Bender and Koschier [BK15,BK17].
References:
[BK15] Jan Bender and Dan Koschier. Divergence-free smoothed particle hydrodynamics. In ACM SIGGRAPH / Eurographics Symposium on Computer Animation, SCA ‘15, 147-155. New York, NY, USA, 2015. ACM. URL: http://doi.acm.org/10.1145/2786784.2786796
[BK17] Jan Bender and Dan Koschier. Divergence-free SPH for incompressible and viscous fluids. IEEE Transactions on Visualization and Computer Graphics, 23(3):1193-1206, 2017. URL: http://dx.doi.org/10.1109/TVCG.2016.2578335
Public Functions
-
SimulationDataDFSPH()¶
-
~SimulationDataDFSPH()¶
-
void
init()¶ Initialize the arrays containing the particle data.
-
void
cleanup()¶ Release the arrays containing the particle data.
-
void
reset()¶ Reset the particle data.
-
void
performNeighborhoodSearchSort()¶ Important: First call m_model->performNeighborhoodSearchSort() to call the z_sort of the neighborhood search.
-
void
emittedParticles(FluidModel *model, const unsigned int startIndex)¶
-
FORCE_INLINE const Real getFactor (const unsigned int fluidIndex, const unsigned int i) const
-
FORCE_INLINE Real & getFactor (const unsigned int fluidIndex, const unsigned int i)
-
FORCE_INLINE void setFactor (const unsigned int fluidIndex, const unsigned int i, const Real p)
-
FORCE_INLINE const Real getKappa (const unsigned int fluidIndex, const unsigned int i) const
-
FORCE_INLINE Real & getKappa (const unsigned int fluidIndex, const unsigned int i)
-
FORCE_INLINE void setKappa (const unsigned int fluidIndex, const unsigned int i, const Real p)
-
FORCE_INLINE const Real getKappaV (const unsigned int fluidIndex, const unsigned int i) const
-
FORCE_INLINE Real & getKappaV (const unsigned int fluidIndex, const unsigned int i)
-
FORCE_INLINE void setKappaV (const unsigned int fluidIndex, const unsigned int i, const Real p)
-
FORCE_INLINE const Real getDensityAdv (const unsigned int fluidIndex, const unsigned int i) const
-
FORCE_INLINE Real & getDensityAdv (const unsigned int fluidIndex, const unsigned int i)
-
FORCE_INLINE void setDensityAdv (const unsigned int fluidIndex, const unsigned int i, const Real d)
Class SimulationDataIISPH¶
Defined in File SimulationDataIISPH.h
Class Documentation¶
-
class
SPH::SimulationDataIISPH¶ Simulation data which is required by the method Implicit Incompressible SPH introduced by Ihmsen et al. [ICS+14].
References:
[ICS+14] Markus Ihmsen, Jens Cornelis, Barbara Solenthaler, Christopher Horvath, and Matthias Teschner. Implicit incompressible SPH. IEEE Transactions on Visualization and Computer Graphics, 20(3):426-435, March 2014. URL: http://dx.doi.org/10.1109/TVCG.2013.105
Public Functions
-
SimulationDataIISPH()¶
-
~SimulationDataIISPH()¶
-
void
init()¶ Initialize the arrays containing the particle data.
-
void
cleanup()¶ Release the arrays containing the particle data.
-
void
reset()¶ Reset the particle data.
-
void
performNeighborhoodSearchSort()¶ Important: First call m_model->performNeighborhoodSearchSort() to call the z_sort of the neighborhood search.
-
void
emittedParticles(FluidModel *model, const unsigned int startIndex)¶
-
FORCE_INLINE const Real getAii (const unsigned int fluidIndex, const unsigned int i) const
-
FORCE_INLINE Real & getAii (const unsigned int fluidIndex, const unsigned int i)
-
FORCE_INLINE void setAii (const unsigned int fluidIndex, const unsigned int i, const Real aii)
-
FORCE_INLINE Vector3r & getDii (const unsigned int fluidIndex, const unsigned int i)
-
FORCE_INLINE const Vector3r & getDii (const unsigned int fluidIndex, const unsigned int i) const
-
FORCE_INLINE void setDii (const unsigned int fluidIndex, const unsigned int i, const Vector3r &val)
-
FORCE_INLINE Vector3r & getDij_pj (const unsigned int fluidIndex, const unsigned int i)
-
FORCE_INLINE const Vector3r & getDij_pj (const unsigned int fluidIndex, const unsigned int i) const
-
FORCE_INLINE void setDij_pj (const unsigned int fluidIndex, const unsigned int i, const Vector3r &val)
-
FORCE_INLINE const Real getDensityAdv (const unsigned int fluidIndex, const unsigned int i) const
-
FORCE_INLINE Real & getDensityAdv (const unsigned int fluidIndex, const unsigned int i)
-
FORCE_INLINE void setDensityAdv (const unsigned int fluidIndex, const unsigned int i, const Real d)
-
FORCE_INLINE const Real getPressure (const unsigned int fluidIndex, const unsigned int i) const
-
FORCE_INLINE Real & getPressure (const unsigned int fluidIndex, const unsigned int i)
-
FORCE_INLINE void setPressure (const unsigned int fluidIndex, const unsigned int i, const Real p)
-
FORCE_INLINE const Real getLastPressure (const unsigned int fluidIndex, const unsigned int i) const
-
FORCE_INLINE Real & getLastPressure (const unsigned int fluidIndex, const unsigned int i)
-
FORCE_INLINE void setLastPressure (const unsigned int fluidIndex, const unsigned int i, const Real p)
-
FORCE_INLINE Vector3r & getPressureAccel (const unsigned int fluidIndex, const unsigned int i)
-
FORCE_INLINE const Vector3r & getPressureAccel (const unsigned int fluidIndex, const unsigned int i) const
-
FORCE_INLINE void setPressureAccel (const unsigned int fluidIndex, const unsigned int i, const Vector3r &val)
Protected Attributes
Class SimulationDataPBF¶
Defined in File SimulationDataPBF.h
Class Documentation¶
-
class
SPH::SimulationDataPBF¶ Simulation data which is required by the method Position-Based Fluids introduced by Macklin and Mueller [MM13,BMO+14,BMM15].
References:
[MM13] Miles Macklin and Matthias Müller. Position based fluids. ACM Trans. Graph., 32(4):104:1-104:12, July 2013. URL: http://doi.acm.org/10.1145/2461912.2461984
[BMO+14] Jan Bender, Matthias Müller, Miguel A. Otaduy, Matthias Teschner, and Miles Macklin. A survey on position-based simulation methods in computer graphics. Computer Graphics Forum, 33(6):228-251, 2014. URL: http://dx.doi.org/10.1111/cgf.12346
[BMM15] Jan Bender, Matthias Müller, and Miles Macklin. Position-based simulation methods in computer graphics. In EUROGRAPHICS 2015 Tutorials. Eurographics Association, 2015. URL: http://dx.doi.org/10.2312/egt.20151045
Public Functions
-
SimulationDataPBF()¶
-
~SimulationDataPBF()¶
-
void
init()¶ Initialize the arrays containing the particle data.
-
void
cleanup()¶ Release the arrays containing the particle data.
-
void
reset()¶ Reset the particle data.
-
void
performNeighborhoodSearchSort()¶ Important: First call m_model->performNeighborhoodSearchSort() to call the z_sort of the neighborhood search.
-
void
emittedParticles(FluidModel *model, const unsigned int startIndex)¶
-
FORCE_INLINE const Real & getLambda (const unsigned int fluidIndex, const unsigned int i) const
-
FORCE_INLINE Real & getLambda (const unsigned int fluidIndex, const unsigned int i)
-
FORCE_INLINE void setLambda (const unsigned int fluidIndex, const unsigned int i, const Real &val)
-
FORCE_INLINE Vector3r & getDeltaX (const unsigned int fluidIndex, const unsigned int i)
-
FORCE_INLINE const Vector3r & getDeltaX (const unsigned int fluidIndex, const unsigned int i) const
-
FORCE_INLINE void setDeltaX (const unsigned int fluidIndex, const unsigned int i, const Vector3r &val)
-
FORCE_INLINE Vector3r & getLastPosition (const unsigned int fluidIndex, const unsigned int i)
-
FORCE_INLINE const Vector3r & getLastPosition (const unsigned int fluidIndex, const unsigned int i) const
-
FORCE_INLINE void setLastPosition (const unsigned int fluidIndex, const unsigned int i, const Vector3r &pos)
-
FORCE_INLINE Vector3r & getOldPosition (const unsigned int fluidIndex, const unsigned int i)
-
FORCE_INLINE const Vector3r & getOldPosition (const unsigned int fluidIndex, const unsigned int i) const
-
FORCE_INLINE void setOldPosition (const unsigned int fluidIndex, const unsigned int i, const Vector3r &pos)
Class SimulationDataPCISPH¶
Defined in File SimulationDataPCISPH.h
Class Documentation¶
-
class
SPH::SimulationDataPCISPH¶ Simulation data which is required by the method Predictive-corrective Incompressible SPH introduced by Solenthaler and Pajarola [SP09].
References:
[SP09] B. Solenthaler and R. Pajarola. Predictive-corrective incompressible SPH. ACM Trans. Graph., 28(3):40:1-40:6, July 2009. URL: http://doi.acm.org/10.1145/1531326.1531346
Public Functions
-
SimulationDataPCISPH()¶
-
~SimulationDataPCISPH()¶
-
void
init()¶ Initialize the arrays containing the particle data.
-
void
cleanup()¶ Release the arrays containing the particle data.
-
void
reset()¶ Reset the particle data.
-
void
performNeighborhoodSearchSort()¶ Important: First call m_model->performNeighborhoodSearchSort() to call the z_sort of the neighborhood search.
-
void
emittedParticles(FluidModel *model, const unsigned int startIndex)¶
-
FORCE_INLINE Vector3r & getLastPosition (const unsigned int fluidIndex, const unsigned int i)
-
FORCE_INLINE const Vector3r & getLastPosition (const unsigned int fluidIndex, const unsigned int i) const
-
FORCE_INLINE void setLastPosition (const unsigned int fluidIndex, const unsigned int i, const Vector3r &pos)
-
FORCE_INLINE Vector3r & getLastVelocity (const unsigned int fluidIndex, const unsigned int i)
-
FORCE_INLINE const Vector3r & getLastVelocity (const unsigned int fluidIndex, const unsigned int i) const
-
FORCE_INLINE void setLastVelocity (const unsigned int fluidIndex, const unsigned int i, const Vector3r &vel)
-
FORCE_INLINE const Real getDensityAdv (const unsigned int fluidIndex, const unsigned int i) const
-
FORCE_INLINE Real & getDensityAdv (const unsigned int fluidIndex, const unsigned int i)
-
FORCE_INLINE void setDensityAdv (const unsigned int fluidIndex, const unsigned int i, const Real d)
-
FORCE_INLINE const Real getPressure (const unsigned int fluidIndex, const unsigned int i) const
-
FORCE_INLINE Real & getPressure (const unsigned int fluidIndex, const unsigned int i)
-
FORCE_INLINE void setPressure (const unsigned int fluidIndex, const unsigned int i, const Real p)
-
FORCE_INLINE Vector3r & getPressureAccel (const unsigned int fluidIndex, const unsigned int i)
-
FORCE_INLINE const Vector3r & getPressureAccel (const unsigned int fluidIndex, const unsigned int i) const
-
FORCE_INLINE void setPressureAccel (const unsigned int fluidIndex, const unsigned int i, const Vector3r &val)
Class SimulationDataPF¶
Defined in File SimulationDataPF.h
Class Documentation¶
-
class
SPH::SimulationDataPF¶ Simulation data which is required by the method Projective Fluids introduced by Weiler, Koschier and Bender [WKB16].
References:
[WKB16] Marcel Weiler, Dan Koschier, and Jan Bender. Projective fluids. In Proceedings of the 9th International Conference on Motion in Games, MIG ‘16, 79-84. New York, NY, USA, 2016. ACM. URL: http://doi.acm.org/10.1145/2994258.2994282
Public Functions
-
SimulationDataPF()¶
-
~SimulationDataPF()¶
-
void
init()¶ Initialize the arrays containing the particle data.
-
void
cleanup()¶ Release the arrays containing the particle data.
-
void
reset()¶ Reset the particle data.
-
void
performNeighborhoodSearchSort()¶ Important: First call m_model->performNeighborhoodSearchSort() to call the z_sort of the neighborhood search.
-
void
emittedParticles(FluidModel *model, const unsigned int startIndex)¶
-
FORCE_INLINE const Vector3r getOldPosition (const unsigned int fluidIndex, const unsigned int i) const
-
FORCE_INLINE Vector3r & getOldPosition (const unsigned int fluidIndex, const unsigned int i)
-
FORCE_INLINE void setOldPosition (const unsigned int fluidIndex, const unsigned int i, const Vector3r p)
-
FORCE_INLINE const unsigned int getNumFluidNeighbors (const unsigned int fluidIndex, const unsigned int i) const
-
FORCE_INLINE unsigned int & getNumFluidNeighbors (const unsigned int fluidIndex, const unsigned int i)
-
FORCE_INLINE void setNumFluidNeighbors (const unsigned int fluidIndex, const unsigned int i, const unsigned int n)
-
FORCE_INLINE const Vector3r & getS (const unsigned int fluidIndex, const unsigned int i) const
-
FORCE_INLINE Vector3r & getS (const unsigned int fluidIndex, const unsigned int i)
-
FORCE_INLINE void setS (const unsigned int fluidIndex, const unsigned int i, const Vector3r &s)
-
FORCE_INLINE const Vector3r & getDiag (const unsigned int fluidIndex, const unsigned int i) const
-
FORCE_INLINE Vector3r & getDiag (const unsigned int fluidIndex, const unsigned int i)
-
FORCE_INLINE void setDiag (const unsigned int fluidIndex, const unsigned int i, const Vector3r &s)
-
FORCE_INLINE const unsigned int & getParticleOffset (const unsigned int fluidIndex) const
Class SimulationDataWCSPH¶
Defined in File SimulationDataWCSPH.h
Class Documentation¶
-
class
SPH::SimulationDataWCSPH¶ Simulation data which is required by the method Weakly Compressible SPH for Free Surface Flows introduced by Becker and Teschner [BT07].
References:
[BT07] Markus Becker and Matthias Teschner. Weakly compressible SPH for free surface flows. In ACM SIGGRAPH/Eurographics Symposium on Computer Animation, SCA ‘07, 209-217. Aire-la-Ville, Switzerland, Switzerland, 2007. Eurographics Association. URL: http://dl.acm.org/citation.cfm?id=1272690.1272719
Public Functions
-
SimulationDataWCSPH()¶
-
~SimulationDataWCSPH()¶
-
void
init()¶ Initialize the arrays containing the particle data.
-
void
cleanup()¶ Release the arrays containing the particle data.
-
void
reset()¶ Reset the particle data.
-
void
performNeighborhoodSearchSort()¶ Important: First call m_model->performNeighborhoodSearchSort() to call the z_sort of the neighborhood search.
-
void
emittedParticles(FluidModel *model, const unsigned int startIndex)¶
-
FORCE_INLINE const Real getPressure (const unsigned int fluidIndex, const unsigned int i) const
-
FORCE_INLINE Real & getPressure (const unsigned int fluidIndex, const unsigned int i)
-
FORCE_INLINE void setPressure (const unsigned int fluidIndex, const unsigned int i, const Real p)
-
FORCE_INLINE Vector3r & getPressureAccel (const unsigned int fluidIndex, const unsigned int i)
-
FORCE_INLINE const Vector3r & getPressureAccel (const unsigned int fluidIndex, const unsigned int i) const
-
FORCE_INLINE void setPressureAccel (const unsigned int fluidIndex, const unsigned int i, const Vector3r &val)
Class StaticRigidBody¶
Defined in File StaticRigidBody.h
Inheritance Relationships¶
Base Type¶
public SPH::RigidBodyObject(Class RigidBodyObject)
Class Documentation¶
-
class
SPH::StaticRigidBody: public SPH::RigidBodyObject¶ This class stores the information of a static rigid body which is not part of a rigid body simulation.
Public Functions
-
StaticRigidBody()¶
-
bool
isDynamic() const¶
-
const std::vector<unsigned int> &
getFaces() const¶
-
TriangleMesh &
getGeometry()¶
-
Class SurfaceTension_Akinci2013¶
Defined in File SurfaceTension_Akinci2013.h
Inheritance Relationships¶
Base Type¶
public SPH::SurfaceTensionBase(Class SurfaceTensionBase)
Class Documentation¶
-
class
SPH::SurfaceTension_Akinci2013: public SPH::SurfaceTensionBase¶ This class implements the surface tension method introduced by Akinci et al. [ATT13].
References:
[AAT13] Nadir Akinci, Gizem Akinci, and Matthias Teschner. Versatile surface tension and adhesion for sph fluids. ACM Trans. Graph., 32(6):182:1-182:8, November 2013. URL: http://doi.acm.org/10.1145/2508363.2508395
Public Functions
-
SurfaceTension_Akinci2013(FluidModel *model)¶
-
~SurfaceTension_Akinci2013(void)¶
-
void
step()¶
-
void
reset()¶
-
void
computeNormals()¶
-
void
performNeighborhoodSearchSort()¶
-
FORCE_INLINE Vector3r & getNormal (const unsigned int i)
-
FORCE_INLINE const Vector3r & getNormal (const unsigned int i) const
-
FORCE_INLINE void setNormal (const unsigned int i, const Vector3r &val)
Class SurfaceTension_Becker2007¶
Defined in File SurfaceTension_Becker2007.h
Inheritance Relationships¶
Base Type¶
public SPH::SurfaceTensionBase(Class SurfaceTensionBase)
Class Documentation¶
-
class
SPH::SurfaceTension_Becker2007: public SPH::SurfaceTensionBase¶ This class implements the surface tension method introduced by Becker and Teschner [BT07].
References:
[BT07] Markus Becker and Matthias Teschner. Weakly compressible SPH for free surface flows. In ACM SIGGRAPH/Eurographics Symposium on Computer Animation, SCA ‘07, 209-217. Aire-la-Ville, Switzerland, Switzerland, 2007. Eurographics Association. URL: http://dl.acm.org/citation.cfm?id=1272690.1272719
Public Functions
-
SurfaceTension_Becker2007(FluidModel *model)¶
-
~SurfaceTension_Becker2007(void)¶
-
void
step()¶
-
void
reset()¶
Class SurfaceTension_He2014¶
Defined in File SurfaceTension_He2014.h
Inheritance Relationships¶
Base Type¶
public SPH::SurfaceTensionBase(Class SurfaceTensionBase)
Class Documentation¶
-
class
SPH::SurfaceTension_He2014: public SPH::SurfaceTensionBase¶ This class implements the surface tension method introduced by He et al. [HWZ+14].
References:
[HWZ+14] Xiaowei He, Huamin Wang, Fengjun Zhang, Hongan Wang, Guoping Wang, and Kun Zhou. Robust simulation of sparsely sampled thin features in SPH-based free surface flows. ACM Trans. Graph., 34(1):7:1-7:9, December 2014. URL: http://doi.acm.org/10.1145/2682630
Public Functions
-
SurfaceTension_He2014(FluidModel *model)¶
-
~SurfaceTension_He2014(void)¶
-
void
step()¶
-
void
reset()¶
-
void
performNeighborhoodSearchSort()¶
-
FORCE_INLINE const Real getColor (const unsigned int i) const
-
FORCE_INLINE Real & getColor (const unsigned int i)
-
FORCE_INLINE void setColor (const unsigned int i, const Real p)
-
FORCE_INLINE const Real getGradC2 (const unsigned int i) const
-
FORCE_INLINE Real & getGradC2 (const unsigned int i)
-
FORCE_INLINE void setGradC2 (const unsigned int i, const Real p)
Class SurfaceTensionBase¶
Defined in File SurfaceTensionBase.h
Inheritance Relationships¶
Base Type¶
public SPH::NonPressureForceBase(Class NonPressureForceBase)
Derived Types¶
public SPH::SurfaceTension_Akinci2013(Class SurfaceTension_Akinci2013)public SPH::SurfaceTension_Becker2007(Class SurfaceTension_Becker2007)public SPH::SurfaceTension_He2014(Class SurfaceTension_He2014)
Class Documentation¶
-
class
SPH::SurfaceTensionBase: public SPH::NonPressureForceBase¶ Base class for all surface tension methods.
Subclassed by SPH::SurfaceTension_Akinci2013, SPH::SurfaceTension_Becker2007, SPH::SurfaceTension_He2014
Protected Functions
-
void
initParameters()¶
-
void
Class TimeIntegration¶
Defined in File TimeIntegration.h
Class Documentation¶
-
class
SPH::TimeIntegration¶ Class for the position-based fluids time integration.
Public Static Functions
-
void
semiImplicitEuler(const Real h, const Real mass, Vector3r &position, Vector3r &velocity, const Vector3r &acceleration)¶ Perform an integration step for a particle using the semi-implicit Euler (symplectic Euler) method:
\[\begin{split}\begin{align*} \mathbf{v}(t+h) &= \mathbf{v}(t) + \mathbf{a}(t) h\\ \mathbf{x}(t+h) &= \mathbf{x}(t) + \mathbf{v}(t+h) h \end{align*}\end{split}\]- Parameters
h: time step sizemass: mass of the particleposition: position of the particlevelocity: velocity of the particleacceleration: acceleration of the particle
-
void
velocityUpdateFirstOrder(const Real h, const Real mass, const Vector3r &position, const Vector3r &oldPosition, Vector3r &velocity)¶ Perform a velocity update (first order) for the linear velocity:
\[\begin{equation*} \mathbf{v}(t+h) = \frac{1}{h} (\mathbf{p}(t+h) - \mathbf{p}(t) \end{equation*}\]- Parameters
h: time step sizemass: mass of the particleposition: new position \(\mathbf{p}(t+h)\) of the particleoldPosition: position \(\mathbf{p}(t)\) of the particle before the time stepvelocity: resulting velocity of the particle
-
void
Class TimeManager¶
Defined in File TimeManager.h
Class Documentation¶
-
class
SPH::TimeManager¶ Class to manage the current simulation time and the time step size. This class is a singleton.
Public Functions
-
TimeManager()¶
-
~TimeManager()¶
-
void
saveState(BinaryFileWriter &binWriter)¶
-
void
loadState(BinaryFileReader &binReader)¶
Public Static Functions
-
TimeManager *
getCurrent()¶
-
void
setCurrent(TimeManager *tm)¶
-
bool
hasCurrent()¶
-
Class TimeStep¶
Defined in File TimeStep.h
Inheritance Relationships¶
Base Type¶
public ParameterObject
Derived Types¶
public SPH::TimeStepDFSPH(Class TimeStepDFSPH)public SPH::TimeStepIISPH(Class TimeStepIISPH)public SPH::TimeStepPBF(Class TimeStepPBF)public SPH::TimeStepPCISPH(Class TimeStepPCISPH)public SPH::TimeStepPF(Class TimeStepPF)public SPH::TimeStepWCSPH(Class TimeStepWCSPH)
Class Documentation¶
-
class
SPH::TimeStep: public ParameterObject¶ Base class for the simulation methods.
Subclassed by SPH::TimeStepDFSPH, SPH::TimeStepIISPH, SPH::TimeStepPBF, SPH::TimeStepPCISPH, SPH::TimeStepPF, SPH::TimeStepWCSPH
Public Functions
-
TimeStep()¶
-
~TimeStep(void)¶
-
void
step() = 0¶
-
void
reset()¶
-
void
init()¶
-
void
resize() = 0¶
-
void
emittedParticles(FluidModel *model, const unsigned int startIndex)¶
-
void
saveState(BinaryFileWriter &binWriter)¶
-
void
loadState(BinaryFileReader &binReader)¶
Public Static Attributes
-
int
SOLVER_ITERATIONS= -1¶
-
int
MIN_ITERATIONS= -1¶
-
int
MAX_ITERATIONS= -1¶
-
int
MAX_ERROR= -1¶
Protected Functions
-
void
clearAccelerations(const unsigned int fluidModelIndex)¶ Clear accelerations and add gravitation.
-
void
computeDensities(const unsigned int fluidModelIndex)¶ Determine densities of all fluid particles.
-
void
initParameters()¶
-
void
approximateNormal(Discregrid::DiscreteGrid *map, const Eigen::Vector3d &x, Vector3r &n, const unsigned int dim)¶
-
void
computeVolumeAndBoundaryX(const unsigned int fluidModelIndex, const unsigned int i, const Vector3r &xi)¶
-
void
computeVolumeAndBoundaryX()¶
-
void
computeDensityAndGradient(const unsigned int fluidModelIndex, const unsigned int i, const Vector3r &xi)¶
-
void
computeDensityAndGradient()¶
-
Class TimeStepDFSPH¶
Defined in File TimeStepDFSPH.h
Inheritance Relationships¶
Base Type¶
public SPH::TimeStep(Class TimeStep)
Class Documentation¶
-
class
SPH::TimeStepDFSPH: public SPH::TimeStep¶ This class implements the Divergence-free Smoothed Particle Hydrodynamics approach introduced by Bender and Koschier [BK15,BK17,KBST19].
References:
[BK15] Jan Bender and Dan Koschier. Divergence-free smoothed particle hydrodynamics. In ACM SIGGRAPH / Eurographics Symposium on Computer Animation, SCA ‘15, 147-155. New York, NY, USA, 2015. ACM. URL: http://doi.acm.org/10.1145/2786784.2786796
[BK17] Jan Bender and Dan Koschier. Divergence-free SPH for incompressible and viscous fluids. IEEE Transactions on Visualization and Computer Graphics, 23(3):1193-1206, 2017. URL: http://dx.doi.org/10.1109/TVCG.2016.2578335
[KBST19] Dan Koschier, Jan Bender, Barbara Solenthaler, and Matthias Teschner. Smoothed particle hydrodynamics for physically-based simulation of fluids and solids. In Eurographics 2019 - Tutorials. Eurographics Association, 2019. URL: https://interactivecomputergraphics.github.io/SPH-Tutorial
Public Static Attributes
-
int
SOLVER_ITERATIONS_V= -1¶
-
int
MAX_ITERATIONS_V= -1¶
-
int
MAX_ERROR_V= -1¶
-
int
USE_DIVERGENCE_SOLVER= -1¶
Protected Functions
-
void
computeDFSPHFactor(const unsigned int fluidModelIndex)¶
-
void
pressureSolve()¶
-
void
divergenceSolve()¶
-
void
computeDensityAdv(const unsigned int fluidModelIndex, const unsigned int index, const int numParticles, const Real h, const Real density0)¶
-
void
computeDensityChange(const unsigned int fluidModelIndex, const unsigned int index, const Real h)¶
-
void
warmstartDivergenceSolve(const unsigned int fluidModelIndex)¶
-
void
warmstartPressureSolve(const unsigned int fluidModelIndex)¶
-
void
performNeighborhoodSearch()¶ Perform the neighborhood search for all fluid particles.
-
void
emittedParticles(FluidModel *model, const unsigned int startIndex)¶
-
void
initParameters()¶
Class TimeStepIISPH¶
Defined in File TimeStepIISPH.h
Inheritance Relationships¶
Base Type¶
public SPH::TimeStep(Class TimeStep)
Class Documentation¶
-
class
SPH::TimeStepIISPH: public SPH::TimeStep¶ This class implements the Implicit Incompressible SPH approach introduced by Ihmsen et al. [ICS+14].
References:
[ICS+14] Markus Ihmsen, Jens Cornelis, Barbara Solenthaler, Christopher Horvath, and Matthias Teschner. Implicit incompressible SPH. IEEE Transactions on Visualization and Computer Graphics, 20(3):426-435, March 2014. URL: http://dx.doi.org/10.1109/TVCG.2013.105
Public Functions
-
TimeStepIISPH()¶
-
~TimeStepIISPH(void)¶
-
void
step()¶
-
void
reset()¶
-
void
resize()¶
-
const SimulationDataIISPH &
getSimulationData()¶
Protected Functions
-
void
predictAdvection(const unsigned int fluidModelIndex)¶
-
void
pressureSolve()¶
-
void
integration(const unsigned int fluidModelIndex)¶
-
void
computePressureAccels(const unsigned int fluidModelIndex)¶ Determine the pressure accelerations when the pressure is already known.
-
void
performNeighborhoodSearch()¶ Perform the neighborhood search for all fluid particles.
-
void
emittedParticles(FluidModel *model, const unsigned int startIndex)¶
Class TimeStepPBF¶
Defined in File TimeStepPBF.h
Inheritance Relationships¶
Base Type¶
public SPH::TimeStep(Class TimeStep)
Class Documentation¶
-
class
SPH::TimeStepPBF: public SPH::TimeStep¶ This class implements the position-based fluids approach introduced by Macklin and Mueller [MM13,BMO+14,BMM15].
References:
[MM13] Miles Macklin and Matthias Müller. Position based fluids. ACM Trans. Graph., 32(4):104:1-104:12, July 2013. URL: http://doi.acm.org/10.1145/2461912.2461984
[BMO+14] Jan Bender, Matthias Müller, Miguel A. Otaduy, Matthias Teschner, and Miles Macklin. A survey on position-based simulation methods in computer graphics. Computer Graphics Forum, 33(6):228-251, 2014. URL: http://dx.doi.org/10.1111/cgf.12346
[BMM15] Jan Bender, Matthias Müller, and Miles Macklin. Position-based simulation methods in computer graphics. In EUROGRAPHICS 2015 Tutorials. Eurographics Association, 2015. URL: http://dx.doi.org/10.2312/egt.20151045
Public Functions
-
TimeStepPBF()¶ Initialize the simulation data required for this method.
-
~TimeStepPBF(void)¶
-
void
step()¶ Perform a simulation step.
-
void
reset()¶ Reset the simulation method.
-
void
resize()¶
Public Static Attributes
-
int
VELOCITY_UPDATE_METHOD= -1¶
-
int
ENUM_PBF_FIRST_ORDER= -1¶
-
int
ENUM_PBF_SECOND_ORDER= -1¶
Protected Functions
-
void
pressureSolve()¶ Perform a position-based correction step for the following density constraint:\(C(\mathbf{x}) = \left (\frac{\rho_i}{\rho_0} - 1 \right )= 0\)
-
void
performNeighborhoodSearch()¶ Perform the neighborhood search for all fluid particles.
-
void
emittedParticles(FluidModel *model, const unsigned int startIndex)¶
-
void
initParameters()¶
Protected Attributes
-
SimulationDataPBF
m_simulationData¶
-
unsigned int
m_counter¶
-
int
m_velocityUpdateMethod¶
Class TimeStepPCISPH¶
Defined in File TimeStepPCISPH.h
Inheritance Relationships¶
Base Type¶
public SPH::TimeStep(Class TimeStep)
Class Documentation¶
-
class
SPH::TimeStepPCISPH: public SPH::TimeStep¶ This class implements the Predictive-corrective Incompressible SPH approach introduced by Solenthaler and Pajarola [SP09].
References:
[SP09] B. Solenthaler and R. Pajarola. Predictive-corrective incompressible SPH. ACM Trans. Graph., 28(3):40:1-40:6, July 2009. URL: http://doi.acm.org/10.1145/1531326.1531346
Protected Functions
-
void
pressureSolve()¶
-
void
performNeighborhoodSearch()¶ Perform the neighborhood search for all fluid particles.
-
void
emittedParticles(FluidModel *model, const unsigned int startIndex)¶
Class TimeStepPF¶
Defined in File TimeStepPF.h
Inheritance Relationships¶
Base Type¶
public SPH::TimeStep(Class TimeStep)
Class Documentation¶
-
class
SPH::TimeStepPF: public SPH::TimeStep¶ This class implements the Projective Fluids approach introduced by Weiler, Koschier and Bender [WKB16].
References:
[WKB16] Marcel Weiler, Dan Koschier, and Jan Bender. Projective fluids. In Proceedings of the 9th International Conference on Motion in Games, MIG ‘16, 79-84. New York, NY, USA, 2016. ACM. URL: http://doi.acm.org/10.1145/2994258.2994282
Public Functions
-
TimeStepPF()¶
-
~TimeStepPF(void)¶
-
void
step() override¶
-
void
reset() override¶
-
void
resize() override¶
Public Static Attributes
-
int
STIFFNESS= -1¶
Protected Types
-
using
Solver= Eigen::ConjugateGradient<MatrixReplacement, Eigen::Lower | Eigen::Upper, JacobiPreconditioner3D>¶
Protected Functions
-
void
preparePreconditioner()¶
-
void
initialGuessForPositions(const unsigned int fluidModelIndex)¶
-
void
solvePDConstraints()¶
-
void
addAccellerationToVelocity()¶
-
void
matrixFreeRHS(const VectorXr &x, VectorXr &result)¶ compute the right hand side of the system in a matrix-free fashion and store the result in result
-
void
performNeighborhoodSearch()¶ Perform the neighborhood search for all fluid particles.
-
void
emittedParticles(FluidModel *model, const unsigned int startIndex) override¶
-
void
initParameters() override¶
Protected Attributes
-
SimulationDataPF
m_simulationData¶
-
unsigned int
m_counter¶
-
unsigned int
m_numActiveParticlesTotal¶
Protected Static Functions
-
FORCE_INLINE void diagonalMatrixElement (const unsigned int row, Vector3r &result, void *userData)
Class TimeStepWCSPH¶
Defined in File TimeStepWCSPH.h
Inheritance Relationships¶
Base Type¶
public SPH::TimeStep(Class TimeStep)
Class Documentation¶
-
class
SPH::TimeStepWCSPH: public SPH::TimeStep¶ This class implements the Weakly Compressible SPH for Free Surface Flows approach introduced by Becker and Teschner [BT07].
References:
[BT07] Markus Becker and Matthias Teschner. Weakly compressible SPH for free surface flows. In ACM SIGGRAPH/Eurographics Symposium on Computer Animation, SCA ‘07, 209-217. Aire-la-Ville, Switzerland, Switzerland, 2007. Eurographics Association. URL: http://dl.acm.org/citation.cfm?id=1272690.1272719
Protected Functions
-
void
computePressureAccels(const unsigned int fluidModelIndex)¶ Determine the pressure accelerations when the pressure is already known.
-
void
performNeighborhoodSearch()¶ Perform the neighborhood search for all fluid particles.
-
void
emittedParticles(FluidModel *model, const unsigned int startIndex)¶
-
void
initParameters()¶
Class TriangleMesh¶
Defined in File TriangleMesh.h
Class Documentation¶
-
class
SPH::TriangleMesh¶ Data structure for a triangle mesh with normals and vertex normals.
Public Types
-
typedef std::vector<unsigned int>
Faces¶
Public Functions
-
TriangleMesh()¶
-
~TriangleMesh()¶
-
void
release()¶
-
void
initMesh(const unsigned int nPoints, const unsigned int nFaces)¶
-
void
addFace(const unsigned int *const indices)¶ Add a new face.
-
void
addFace(const int *const indices)¶ Add a new face.
-
unsigned int
numVertices() const¶
-
unsigned int
numFaces() const¶
-
void
updateNormals()¶
-
void
updateVertexNormals()¶
-
typedef std::vector<unsigned int>
Class Viscosity_Bender2017¶
Defined in File Viscosity_Bender2017.h
Inheritance Relationships¶
Base Type¶
public SPH::ViscosityBase(Class ViscosityBase)
Class Documentation¶
-
class
SPH::Viscosity_Bender2017: public SPH::ViscosityBase¶ This class implements the implicit simulation method for viscous fluids introduced by Bender and Koschier [BK17].
References:
[BK17] Jan Bender and Dan Koschier. Divergence-free SPH for incompressible and viscous fluids. IEEE Transactions on Visualization and Computer Graphics, 23(3):1193-1206, 2017. URL: http://dx.doi.org/10.1109/TVCG.2016.2578335
Public Functions
-
Viscosity_Bender2017(FluidModel *model)¶
-
~Viscosity_Bender2017(void)¶
-
void
step()¶
-
void
reset()¶
-
void
performNeighborhoodSearchSort()¶
-
void
computeTargetStrainRate()¶
-
void
computeViscosityFactor()¶
-
FORCE_INLINE void viscoGradientMultTransposeRightOpt (const Eigen::Matrix< Real, 6, 3 > &a, const Eigen::Matrix< Real, 6, 3 > &b, Matrix6r &c) Matrix product
-
FORCE_INLINE const Vector6r & getTargetStrainRate (const unsigned int i) const
-
FORCE_INLINE Vector6r & getTargetStrainRate (const unsigned int i)
-
FORCE_INLINE void setTargetStrainRate (const unsigned int i, const Vector6r &val)
-
FORCE_INLINE const Matrix6r & getViscosityFactor (const unsigned int i) const
-
FORCE_INLINE Matrix6r & getViscosityFactor (const unsigned int i)
-
FORCE_INLINE void setViscosityFactor (const unsigned int i, const Matrix6r &val)
-
FORCE_INLINE const Vector6r & getViscosityLambda (const unsigned int i) const
-
FORCE_INLINE Vector6r & getViscosityLambda (const unsigned int i)
-
FORCE_INLINE void setViscosityLambda (const unsigned int i, const Vector6r &val)
Protected Functions
-
void
initParameters()¶
Class Viscosity_Peer2015¶
Defined in File Viscosity_Peer2015.h
Inheritance Relationships¶
Base Type¶
public SPH::ViscosityBase(Class ViscosityBase)
Class Documentation¶
-
class
SPH::Viscosity_Peer2015: public SPH::ViscosityBase¶ This class implements the implicit simulation method for viscous fluids introduced by Peer et al. [PICT15].
References:
[PICT15] A. Peer, M. Ihmsen, J. Cornelis, and M. Teschner. An Implicit Viscosity Formulation for SPH Fluids. ACM Trans. Graph., 34(4):1-10, 2015. URL: http://doi.acm.org/10.1145/2766925
Public Functions
-
Viscosity_Peer2015(FluidModel *model)¶
-
~Viscosity_Peer2015(void)¶
-
void
step()¶
-
void
reset()¶
-
void
performNeighborhoodSearchSort()¶
-
FORCE_INLINE const Matrix3r & getTargetNablaV (const unsigned int i) const
-
FORCE_INLINE Matrix3r & getTargetNablaV (const unsigned int i)
-
FORCE_INLINE void setTargetNablaV (const unsigned int i, const Matrix3r &val)
Public Static Functions
-
FORCE_INLINE void diagonalMatrixElement (const unsigned int row, Real &result, void *userData)
Protected Types
-
typedef Eigen::ConjugateGradient<MatrixReplacement, Eigen::Lower | Eigen::Upper, JacobiPreconditioner1D>
Solver¶
Class Viscosity_Peer2016¶
Defined in File Viscosity_Peer2016.h
Inheritance Relationships¶
Base Type¶
public SPH::ViscosityBase(Class ViscosityBase)
Class Documentation¶
-
class
SPH::Viscosity_Peer2016: public SPH::ViscosityBase¶ This class implements the implicit simulation method for viscous fluids introduced by Peer and Teschner [PGBT17].
References:
[PGBT17] Andreas Peer, Christoph Gissler, Stefan Band, and Matthias Teschner. An implicit SPH formulation for incompressible linearly elastic solids. Computer Graphics Forum, 2017. URL: http://dx.doi.org/10.1111/cgf.13317
Public Functions
-
Viscosity_Peer2016(FluidModel *model)¶
-
~Viscosity_Peer2016(void)¶
-
void
step()¶
-
void
reset()¶
-
void
performNeighborhoodSearchSort()¶
-
FORCE_INLINE const Matrix3r & getTargetNablaV (const unsigned int i) const
-
FORCE_INLINE Matrix3r & getTargetNablaV (const unsigned int i)
-
FORCE_INLINE void setTargetNablaV (const unsigned int i, const Matrix3r &val)
-
FORCE_INLINE const Vector3r & getOmega (const unsigned int i) const
-
FORCE_INLINE Vector3r & getOmega (const unsigned int i)
-
FORCE_INLINE void setOmega (const unsigned int i, const Vector3r &val)
Public Static Functions
-
FORCE_INLINE void diagonalMatrixElementV (const unsigned int row, Real &result, void *userData)
-
FORCE_INLINE void diagonalMatrixElementOmega (const unsigned int row, Real &result, void *userData)
Public Static Attributes
-
int
ITERATIONS_V= -1¶
-
int
ITERATIONS_OMEGA= -1¶
-
int
MAX_ITERATIONS_V= -1¶
-
int
MAX_ERROR_V= -1¶
-
int
MAX_ITERATIONS_OMEGA= -1¶
-
int
MAX_ERROR_OMEGA= -1¶
Protected Types
-
typedef Eigen::ConjugateGradient<MatrixReplacement, Eigen::Lower | Eigen::Upper, JacobiPreconditioner1D>
Solver¶
Class Viscosity_Standard¶
Defined in File Viscosity_Standard.h
Inheritance Relationships¶
Base Type¶
public SPH::ViscosityBase(Class ViscosityBase)
Class Documentation¶
-
class
SPH::Viscosity_Standard: public SPH::ViscosityBase¶ This class implements the standard method for viscosity descibed e.g. by Ihmsen et al. [IOS+14].
The method evaluates the term
\(\nu \nabla^2 \mathbf{v}\) and uses an approximation of the kernel Laplacian to improve the stability. This approximation is given in [IOS+14].References:
[IOS+14] Markus Ihmsen, Jens Orthmann, Barbara Solenthaler, Andreas Kolb, and Matthias Teschner. SPH Fluids in Computer Graphics. In Sylvain Lefebvre and Michela Spagnuolo, editors, Eurographics 2014 - State of the Art Reports. The Eurographics Association, 2014. URL: http://dx.doi.org/10.2312/egst.20141034
Public Functions
-
Viscosity_Standard(FluidModel *model)¶
-
~Viscosity_Standard(void)¶
-
void
step()¶
-
void
reset()¶
Public Static Attributes
-
int
VISCOSITY_COEFFICIENT_BOUNDARY= -1¶
Protected Functions
-
void
initParameters()¶
Class Viscosity_Takahashi2015¶
Defined in File Viscosity_Takahashi2015.h
Inheritance Relationships¶
Base Type¶
public SPH::ViscosityBase(Class ViscosityBase)
Class Documentation¶
-
class
SPH::Viscosity_Takahashi2015: public SPH::ViscosityBase¶ This class implements a variant of the implicit simulation method for viscous fluids introduced by Takahashi et al. [TDF+15]. In the original work of Takahashi et al. the second-ring neighbors are required to create the matrix of the linear system. In contrast we use a meshless conjugate gradient solver which performs the required matrix-vector multiplication in two sequential loops. In this way only the one-ring neighbors are required in each loop which increases the performance significantly.
Thanks to Anreas Peer who helped us with the implementation.
References:
[TDF+15] T. Takahashi, Y. Dobashi, I. Fujishiro, T. Nishita, and M.C. Lin. Implicit Formulation for SPH-based Viscous Fluids. Computer Graphics Forum, 34(2):493-502, 2015. URL: http://dx.doi.org/10.1111/cgf.12578
Public Functions
-
Viscosity_Takahashi2015(FluidModel *model)¶
-
~Viscosity_Takahashi2015(void)¶
-
void
step()¶
-
void
reset()¶
-
void
performNeighborhoodSearchSort()¶
-
FORCE_INLINE const Matrix3r & getViscousStress (const unsigned int i) const
-
FORCE_INLINE Matrix3r & getViscousStress (const unsigned int i)
-
FORCE_INLINE void setViscousStress (const unsigned int i, const Matrix3r &val)
-
FORCE_INLINE const Vector3r & getAccel (const unsigned int i) const
-
FORCE_INLINE Vector3r & getAccel (const unsigned int i)
-
FORCE_INLINE void setAccel (const unsigned int i, const Vector3r &val)
Public Static Functions
-
FORCE_INLINE void diagonalMatrixElement (const unsigned int row, Real &result, void *userData)
Protected Types
-
typedef Eigen::ConjugateGradient<MatrixReplacement, Eigen::Lower | Eigen::Upper, Eigen::IdentityPreconditioner>
Solver¶
Protected Functions
-
void
initParameters()¶
Protected Static Functions
-
void
computeViscosityAcceleration(Viscosity_Takahashi2015 *visco, const Real *v)¶
Class Viscosity_Weiler2018¶
Defined in File Viscosity_Weiler2018.h
Inheritance Relationships¶
Base Type¶
public SPH::ViscosityBase(Class ViscosityBase)
Class Documentation¶
-
class
SPH::Viscosity_Weiler2018: public SPH::ViscosityBase¶ This class implements the implicit Laplace viscosity method introduced by Weiler et al. 2018 [WKBB18].
References:
[WKBB18] Marcel Weiler, Dan Koschier, Magnus Brand, and Jan Bender. A physically consistent implicit viscosity solver for SPH fluids. Computer Graphics Forum (Eurographics), 2018. URL: https://doi.org/10.1111/cgf.13349
Public Functions
-
Viscosity_Weiler2018(FluidModel *model)¶
-
~Viscosity_Weiler2018(void)¶
-
void
step()¶
-
void
reset()¶
-
void
performNeighborhoodSearchSort()¶
Public Static Attributes
-
int
ITERATIONS= -1¶
-
int
MAX_ITERATIONS= -1¶
-
int
MAX_ERROR= -1¶
-
int
VISCOSITY_COEFFICIENT_BOUNDARY= -1¶
Protected Types
-
typedef Eigen::ConjugateGradient<MatrixReplacement, Eigen::Lower | Eigen::Upper, BlockJacobiPreconditioner3D>
Solver¶
Protected Functions
-
void
initParameters()¶
Protected Static Functions
-
FORCE_INLINE void diagonalMatrixElement (const unsigned int row, Matrix3r &result, void *userData)
Class Viscosity_XSPH¶
Defined in File Viscosity_XSPH.h
Inheritance Relationships¶
Base Type¶
public SPH::ViscosityBase(Class ViscosityBase)
Class Documentation¶
-
class
SPH::Viscosity_XSPH: public SPH::ViscosityBase¶ This class implements the XSPH method descibed by Schechter and Bridson [SB12].
References:
[SB12] Hagit Schechter and Robert Bridson. Ghost sph for animating water. ACM Trans. Graph., 31(4):61:1-61:8, July 2012. URL: http://doi.acm.org/10.1145/2185520.2185557
Public Functions
-
Viscosity_XSPH(FluidModel *model)¶
-
~Viscosity_XSPH(void)¶
-
void
step()¶
-
void
reset()¶
Public Static Attributes
-
int
VISCOSITY_COEFFICIENT_BOUNDARY= -1¶
Protected Functions
-
void
initParameters()¶
Class ViscosityBase¶
Defined in File ViscosityBase.h
Inheritance Relationships¶
Base Type¶
public SPH::NonPressureForceBase(Class NonPressureForceBase)
Derived Types¶
public SPH::Viscosity_Bender2017(Class Viscosity_Bender2017)public SPH::Viscosity_Peer2015(Class Viscosity_Peer2015)public SPH::Viscosity_Peer2016(Class Viscosity_Peer2016)public SPH::Viscosity_Standard(Class Viscosity_Standard)public SPH::Viscosity_Takahashi2015(Class Viscosity_Takahashi2015)public SPH::Viscosity_Weiler2018(Class Viscosity_Weiler2018)public SPH::Viscosity_XSPH(Class Viscosity_XSPH)
Class Documentation¶
-
class
SPH::ViscosityBase: public SPH::NonPressureForceBase¶ Base class for all viscosity methods.
Subclassed by SPH::Viscosity_Bender2017, SPH::Viscosity_Peer2015, SPH::Viscosity_Peer2016, SPH::Viscosity_Standard, SPH::Viscosity_Takahashi2015, SPH::Viscosity_Weiler2018, SPH::Viscosity_XSPH
Public Static Attributes
-
int
VISCOSITY_COEFFICIENT= -1¶
Protected Functions
-
void
initParameters()¶
-
int
Class VorticityBase¶
Defined in File VorticityBase.h
Inheritance Relationships¶
Base Type¶
public SPH::NonPressureForceBase(Class NonPressureForceBase)
Derived Types¶
public SPH::MicropolarModel_Bender2017(Class MicropolarModel_Bender2017)public SPH::VorticityConfinement(Class VorticityConfinement)
Class Documentation¶
-
class
SPH::VorticityBase: public SPH::NonPressureForceBase¶ Base class for all vorticity methods.
Subclassed by SPH::MicropolarModel_Bender2017, SPH::VorticityConfinement
Public Static Attributes
-
int
VORTICITY_COEFFICIENT= -1¶
Protected Functions
-
void
initParameters()¶
-
int
Class VorticityConfinement¶
Defined in File VorticityConfinement.h
Inheritance Relationships¶
Base Type¶
public SPH::VorticityBase(Class VorticityBase)
Class Documentation¶
-
class
SPH::VorticityConfinement: public SPH::VorticityBase¶ This class implements the vorticity confinement method introduced by Macklin and Mueller [MM13].
References:
[MM13] Miles Macklin and Matthias Müller. Position based fluids. ACM Trans. Graph., 32(4):104:1-104:12, July 2013. URL: http://doi.acm.org/10.1145/2461912.2461984
Public Functions
-
VorticityConfinement(FluidModel *model)¶
-
~VorticityConfinement(void)¶
-
void
step()¶
-
void
reset()¶
-
void
performNeighborhoodSearchSort()¶
-
FORCE_INLINE const Vector3r & getAngularVelocity (const unsigned int i) const
-
FORCE_INLINE Vector3r & getAngularVelocity (const unsigned int i)
-
FORCE_INLINE void setAngularVelocity (const unsigned int i, const Vector3r &val)
Class ConsoleSink¶
Defined in File Logger.h
Inheritance Relationships¶
Base Type¶
public Utilities::LogSink(Class LogSink)
Class Counting¶
Defined in File Counting.h
Class Documentation¶
-
class
Utilities::Counting¶ Public Static Functions
-
void
reset()¶
-
FORCE_INLINE void increaseCounter (const std::string &name, const Real increaseBy)
-
FORCE_INLINE void printAverageCounts ()
-
FORCE_INLINE void printCounterSums ()
Public Static Attributes
-
std::unordered_map<std::string, AverageCount>
m_averageCounts¶
-
void
Class FileSink¶
Defined in File Logger.h
Inheritance Relationships¶
Base Type¶
public Utilities::LogSink(Class LogSink)
Class FileSystem¶
Defined in File FileSystem.h
Class Documentation¶
-
class
Utilities::FileSystem¶ This class implements different file system functions.
Public Static Functions
-
std::string
getFilePath(const std::string &path)¶
-
std::string
getFileName(const std::string &path)¶
-
std::string
getFileNameWithExt(const std::string &path)¶
-
std::string
getFileExt(const std::string &path)¶
-
bool
isRelativePath(const std::string &path)¶
-
int
makeDir(const std::string &path)¶
-
int
makeDirs(const std::string &path)¶ Make all subdirectories.
-
std::string
normalizePath(const std::string &path)¶
-
bool
fileExists(const std::string &fileName)¶
-
std::string
getProgramPath()¶
-
bool
copyFile(const std::string &source, const std::string &dest)¶
-
bool
isFile(const std::string &path)¶
-
bool
isDirectory(const std::string &path)¶
-
bool
getFilesInDirectory(const std::string &path, std::vector<std::string> &res)¶
-
std::string
getFileMD5(const std::string &filename)¶ Compute the MD5 hash of a file.
-
bool
writeMD5File(const std::string &fileName, const std::string &md5File)¶ Write the MD5 hash of a file to the md5File.
-
bool
checkMD5(const std::string &md5Hash, const std::string &md5File)¶ Compare an MD5 hash with the hash stored in an MD5 file.
-
std::string
Class IDFactory¶
Defined in File Timing.h
Class LogSink¶
Defined in File Logger.h
Inheritance Relationships¶
Derived Types¶
public Utilities::ConsoleSink(Class ConsoleSink)public Utilities::FileSink(Class FileSink)
Class LogStream¶
Defined in File Logger.h
Class OBJLoader¶
Defined in File OBJLoader.h
Class PartioReaderWriter¶
Defined in File PartioReaderWriter.h
Class Documentation¶
-
class
Utilities::PartioReaderWriter¶ Class for reading and writing partio files.
Public Static Functions
-
bool
readParticles(const std::string &fileName, const Vector3r &translation, const Matrix3r &rotation, const Real scale, std::vector<Vector3r> &pos, std::vector<Vector3r> &vel)¶
-
bool
readParticles(const std::string &fileName, const Vector3r &translation, const Matrix3r &rotation, const Real scale, std::vector<Vector3r> &positions, std::vector<Vector3r> &velocities, Real &particleRadius)¶
-
bool
Class SceneLoader¶
Defined in File SceneLoader.h
Nested Relationships¶
Class Documentation¶
-
class
Utilities::SceneLoader¶ Importer of SPlisHSPlasH scene files.
Public Functions
-
template<typename
T, intsize>
boolreadVector(const nlohmann::json &j, Eigen::Matrix<T, size, 1, Eigen::DontAlign> &vec)¶
-
template<typename
T, intsize>
boolreadVector(const std::string §ion, const std::string &key, Eigen::Matrix<T, size, 1, Eigen::DontAlign> &vec)¶
-
void
readMaterialParameterObject(const std::string &key, GenParam::ParameterObject *paramObj)¶
-
void
readParameterObject(const std::string &key, GenParam::ParameterObject *paramObj)¶
-
template<>
boolreadValue(const nlohmann::json &j, bool &v)¶
-
template<>
boolreadValue(const nlohmann::json &j, bool &v)
Protected Functions
-
void
readParameterObject(nlohmann::json &config, GenParam::ParameterObject *paramObj)¶
Protected Attributes
-
nlohmann::json
m_jsonData¶
-
struct
AnimationFieldData¶ Struct to store an animation field object.
-
struct
BoundaryData¶ Struct to store a boundary object.
-
struct
Box¶ Struct for an AABB.
-
struct
EmitterData¶ Struct to store an emitter object.
-
struct
FluidBlock¶ Struct to store a fluid block.
-
struct
FluidData¶ Struct to store a fluid object.
-
struct
MaterialData¶ Struct to store particle coloring information.
-
struct
Scene¶ Struct to store scene information.
Public Members
-
std::vector<BoundaryData*>
boundaryModels¶
-
std::vector<FluidBlock*>
fluidBlocks¶
-
std::vector<EmitterData*>
emitters¶
-
std::vector<AnimationFieldData*>
animatedFields¶
-
std::vector<MaterialData*>
materials¶
-
bool
sim2D¶
-
std::vector<BoundaryData*>
-
template<typename
Class SDFFunctions¶
Defined in File SDFFunctions.h
Class Documentation¶
-
class
Utilities::SDFFunctions¶ Functions for generating and querying an SDF.
Public Static Functions
-
Discregrid::CubicLagrangeDiscreteGrid *
generateSDF(const unsigned int numVertices, const Vector3r *vertices, const unsigned int numFaces, const unsigned int *faces, const AlignedBox3r &bbox, const std::array<unsigned int, 3> &resolution, const bool invert = false)¶ Generate SDF from mesh.
-
AlignedBox3r
computeBoundingBox(const unsigned int numVertices, const Vector3r *vertices)¶ Compute the bounding box of a mesh.
-
Discregrid::CubicLagrangeDiscreteGrid *
Class StringTools¶
Defined in File StringTools.h
Class SystemInfo¶
Defined in File SystemInfo.h
Class Timing¶
Defined in File Timing.h
Class Documentation¶
-
class
Utilities::Timing¶ Class for time measurements.
Public Static Functions
-
void
reset()¶
-
FORCE_INLINE void startTiming (const std::string &name=std::string(""))
-
FORCE_INLINE double stopTiming (bool print=true)
-
FORCE_INLINE double stopTiming (bool print, int &id)
-
FORCE_INLINE void printAverageTimes ()
-
FORCE_INLINE void printTimeSums ()
Public Static Attributes
-
bool
m_dontPrintTimes¶
-
unsigned int
m_startCounter¶
-
unsigned int
m_stopCounter¶
-
std::stack<TimingHelper>
m_timingStack¶
-
std::unordered_map<int, AverageTime>
m_averageTimes¶
-
void
Class VolumeSampling¶
Defined in File VolumeSampling.h
Class Documentation¶
-
class
Utilities::VolumeSampling¶ This class implements a volume sampling of 3D models.
Public Static Functions
-
void
sampleMesh(const unsigned int numVertices, const Vector3r *vertices, const unsigned int numFaces, const unsigned int *faces, const Real radius, const AlignedBox3r *region, const std::array<unsigned int, 3> &resolution, const bool invert, const unsigned int sampleMode, std::vector<Vector3r> &samples)¶ Performs the volume sampling with the respective parameters.
- Parameters
numVertices: number of verticesvertices: vertex datanumFaces: number of facesfaces: index list of facesradius: radius of sampled particlesregion: defines a subregion of the mesh to be sampled (nullptr if not used)resolution: resolution of the used SDFinvert: defines if the mesh should be inverted and the outside is sampledsampleMode: 0=regular, 1=almost dense, 2=densesamples: sampled vertices that will be returned
-
void
Class WindingNumbers¶
Defined in File WindingNumbers.h
Class Documentation¶
-
class
Utilities::WindingNumbers¶ Public Static Functions
-
Real
computeGeneralizedWindingNumber(const Vector3r &p, const Vector3r &a, const Vector3r &b, const Vector3r &c)¶ Determine the winding number for a point p and a triangle abc.
-
Real
computeGeneralizedWindingNumber(const Vector3r &p, const SPH::TriangleMesh &mesh)¶ Determine the winding number of a point p in a triangle mesh.
-
Real
Class Vector3f8¶
Defined in File AVX_math.h
Functions¶
Function blend¶
Defined in File AVX_math.h
Function Documentation¶
Warning
doxygenfunction: Unable to resolve multiple matches for function “blend” with arguments (Scalarf8 const&, Scalarf8 const&, Scalarf8 const&) in doxygen xml output for project “SPlisHSPlasH” from directory: ./doxyoutput/xml. Potential matches:
- Scalarf8 blend(Scalarf8 const &c, Scalarf8 const &a, Scalarf8 const &b)
- Vector3f8 blend(Scalarf8 const &c, Vector3f8 const &a, Vector3f8 const &b)
Template Function constant8f¶
Defined in File AVX_math.h
Function convert_zero(const unsigned int *, const Real *, const unsigned char)¶
Defined in File AVX_math.h
Function Documentation¶
Warning
doxygenfunction: Unable to resolve multiple matches for function “convert_zero” with arguments (const unsigned int *, const Real *, const unsigned char) in doxygen xml output for project “SPlisHSPlasH” from directory: ./doxyoutput/xml. Potential matches:
- Scalarf8 convert_zero(const Real x, const unsigned char count = 8u)
- Scalarf8 convert_zero(const unsigned int *idx, const Real *x, const unsigned char count = 8u)
Function convert_zero(const Real, const unsigned char)¶
Defined in File AVX_math.h
Function Documentation¶
Warning
doxygenfunction: Unable to resolve multiple matches for function “convert_zero” with arguments (const Real, const unsigned char) in doxygen xml output for project “SPlisHSPlasH” from directory: ./doxyoutput/xml. Potential matches:
- Scalarf8 convert_zero(const Real x, const unsigned char count = 8u)
- Scalarf8 convert_zero(const unsigned int *idx, const Real *x, const unsigned char count = 8u)
Function convertVec_zero(const unsigned int *, const Real *, const unsigned char)¶
Defined in File AVX_math.h
Function Documentation¶
Warning
doxygenfunction: Unable to resolve multiple matches for function “convertVec_zero” with arguments (const unsigned int *, const Real *, const unsigned char) in doxygen xml output for project “SPlisHSPlasH” from directory: ./doxyoutput/xml. Potential matches:
- Vector3f8 convertVec_zero(const unsigned int *idx, const Real *v, const unsigned char count = 8u)
- Vector3f8 convertVec_zero(const unsigned int *idx, const Vector3r *v, const unsigned char count = 8u)
Function convertVec_zero(const unsigned int *, const Vector3r *, const unsigned char)¶
Defined in File AVX_math.h
Function Documentation¶
Warning
doxygenfunction: Unable to resolve multiple matches for function “convertVec_zero” with arguments (const unsigned int *, const Vector3r *, const unsigned char) in doxygen xml output for project “SPlisHSPlasH” from directory: ./doxyoutput/xml. Potential matches:
- Vector3f8 convertVec_zero(const unsigned int *idx, const Real *v, const unsigned char count = 8u)
- Vector3f8 convertVec_zero(const unsigned int *idx, const Vector3r *v, const unsigned char count = 8u)
Function getTime¶
Defined in File AnimationField.cpp
Function Documentation¶
-
Real
SPH::TimeManager::getTime()
Function operator*(Scalarf8 const&, Scalarf8 const&)¶
Defined in File AVX_math.h
Function Documentation¶
Warning
doxygenfunction: Unable to resolve multiple matches for function “operator*” with arguments (Scalarf8 const&, Scalarf8 const&) in doxygen xml output for project “SPlisHSPlasH” from directory: ./doxyoutput/xml. Potential matches:
- Matrix3f8 operator*(const Matrix3f8 &b) const
- Matrix3f8 operator*(const Scalarf8 &b) const
- Scalarf8 operator*(Scalarf8 const &a, Scalarf8 const &b)
- Scalarf8 operator*(const Vector3f8 &a) const
- Vector3f8 operator*(Vector3f8 const &a, const Scalarf8 &s)
- Vector3f8 operator*(const Vector3f8 &b) const
- const Quaternion8f operator*(const Quaternion8f &a) const
- template<typename Rhs> Eigen::Product<MatrixReplacement, Rhs, Eigen::AliasFreeProduct> operator*(const Eigen::MatrixBase<Rhs> &x) const
Function operator*(Vector3f8 const&, const Scalarf8&)¶
Defined in File AVX_math.h
Function Documentation¶
Warning
doxygenfunction: Unable to resolve multiple matches for function “operator*” with arguments (Vector3f8 const&, const Scalarf8&) in doxygen xml output for project “SPlisHSPlasH” from directory: ./doxyoutput/xml. Potential matches:
- Matrix3f8 operator*(const Matrix3f8 &b) const
- Matrix3f8 operator*(const Scalarf8 &b) const
- Scalarf8 operator*(Scalarf8 const &a, Scalarf8 const &b)
- Scalarf8 operator*(const Vector3f8 &a) const
- Vector3f8 operator*(Vector3f8 const &a, const Scalarf8 &s)
- Vector3f8 operator*(const Vector3f8 &b) const
- const Quaternion8f operator*(const Quaternion8f &a) const
- template<typename Rhs> Eigen::Product<MatrixReplacement, Rhs, Eigen::AliasFreeProduct> operator*(const Eigen::MatrixBase<Rhs> &x) const
Function operator*=¶
Defined in File AVX_math.h
Function Documentation¶
Warning
doxygenfunction: Unable to resolve multiple matches for function “operator*=” with arguments (Scalarf8&, Scalarf8 const&) in doxygen xml output for project “SPlisHSPlasH” from directory: ./doxyoutput/xml. Potential matches:
- Scalarf8 &operator*=(Scalarf8 &a, Scalarf8 const &b)
- Vector3f8 &operator*=(const Scalarf8 &s)
Function operator+(Scalarf8 const&, Scalarf8 const&)¶
Defined in File AVX_math.h
Function Documentation¶
Warning
doxygenfunction: Unable to resolve multiple matches for function “operator+” with arguments (Scalarf8 const&, Scalarf8 const&) in doxygen xml output for project “SPlisHSPlasH” from directory: ./doxyoutput/xml. Potential matches:
- Scalarf8 operator+(Scalarf8 const &a, Scalarf8 const &b)
- Vector3f8 operator+(Vector3f8 const &a, Vector3f8 const &b)
Function operator+(Vector3f8 const&, Vector3f8 const&)¶
Defined in File AVX_math.h
Function Documentation¶
Warning
doxygenfunction: Unable to resolve multiple matches for function “operator+” with arguments (Vector3f8 const&, Vector3f8 const&) in doxygen xml output for project “SPlisHSPlasH” from directory: ./doxyoutput/xml. Potential matches:
- Scalarf8 operator+(Scalarf8 const &a, Scalarf8 const &b)
- Vector3f8 operator+(Vector3f8 const &a, Vector3f8 const &b)
Function operator+=(Scalarf8&, Scalarf8 const&)¶
Defined in File AVX_math.h
Function Documentation¶
Warning
doxygenfunction: Unable to resolve multiple matches for function “operator+=” with arguments (Scalarf8&, Scalarf8 const&) in doxygen xml output for project “SPlisHSPlasH” from directory: ./doxyoutput/xml. Potential matches:
- Matrix3f8 &operator+=(const Matrix3f8 &a)
- Scalarf8 &operator+=(Scalarf8 &a, Scalarf8 const &b)
- Vector3f8 &operator+=(Vector3f8 &a, Vector3f8 const &b)
Function operator+=(Vector3f8&, Vector3f8 const&)¶
Defined in File AVX_math.h
Function Documentation¶
Warning
doxygenfunction: Unable to resolve multiple matches for function “operator+=” with arguments (Vector3f8&, Vector3f8 const&) in doxygen xml output for project “SPlisHSPlasH” from directory: ./doxyoutput/xml. Potential matches:
- Matrix3f8 &operator+=(const Matrix3f8 &a)
- Scalarf8 &operator+=(Scalarf8 &a, Scalarf8 const &b)
- Vector3f8 &operator+=(Vector3f8 &a, Vector3f8 const &b)
Function operator-(Scalarf8&)¶
Defined in File AVX_math.h
Function Documentation¶
Warning
doxygenfunction: Unable to resolve multiple matches for function “operator-” with arguments (Scalarf8&) in doxygen xml output for project “SPlisHSPlasH” from directory: ./doxyoutput/xml. Potential matches:
- Scalarf8 operator-(Scalarf8 &a)
- Scalarf8 operator-(Scalarf8 const &a, Scalarf8 const &b)
- Vector3f8 operator-(Vector3f8 const &a, Vector3f8 const &b)
- const Vector3f8 operator-() const
Function operator-(Scalarf8 const&, Scalarf8 const&)¶
Defined in File AVX_math.h
Function Documentation¶
Warning
doxygenfunction: Unable to resolve multiple matches for function “operator-” with arguments (Scalarf8 const&, Scalarf8 const&) in doxygen xml output for project “SPlisHSPlasH” from directory: ./doxyoutput/xml. Potential matches:
- Scalarf8 operator-(Scalarf8 &a)
- Scalarf8 operator-(Scalarf8 const &a, Scalarf8 const &b)
- Vector3f8 operator-(Vector3f8 const &a, Vector3f8 const &b)
- const Vector3f8 operator-() const
Function operator-(Vector3f8 const&, Vector3f8 const&)¶
Defined in File AVX_math.h
Function Documentation¶
Warning
doxygenfunction: Unable to resolve multiple matches for function “operator-” with arguments (Vector3f8 const&, Vector3f8 const&) in doxygen xml output for project “SPlisHSPlasH” from directory: ./doxyoutput/xml. Potential matches:
- Scalarf8 operator-(Scalarf8 &a)
- Scalarf8 operator-(Scalarf8 const &a, Scalarf8 const &b)
- Vector3f8 operator-(Vector3f8 const &a, Vector3f8 const &b)
- const Vector3f8 operator-() const
Function operator-=¶
Defined in File AVX_math.h
Function Documentation¶
Warning
doxygenfunction: Unable to resolve multiple matches for function “operator-=” with arguments (Scalarf8&, Scalarf8 const&) in doxygen xml output for project “SPlisHSPlasH” from directory: ./doxyoutput/xml. Potential matches:
- Scalarf8 &operator-=(Scalarf8 &a, Scalarf8 const &b)
- Vector3f8 &operator-=(const Vector3f8 &a)
Function operator/¶
Defined in File AVX_math.h
Function Documentation¶
Warning
doxygenfunction: Unable to resolve multiple matches for function “operator/” with arguments (Scalarf8 const&, Scalarf8 const&) in doxygen xml output for project “SPlisHSPlasH” from directory: ./doxyoutput/xml. Potential matches:
- Scalarf8 operator/(Scalarf8 const &a, Scalarf8 const &b)
- const Vector3f8 operator/(const Scalarf8 &s) const
Function operator/=¶
Defined in File AVX_math.h
Function Documentation¶
Warning
doxygenfunction: Unable to resolve multiple matches for function “operator/=” with arguments (Scalarf8&, Scalarf8 const&) in doxygen xml output for project “SPlisHSPlasH” from directory: ./doxyoutput/xml. Potential matches:
- Scalarf8 &operator/=(Scalarf8 &a, Scalarf8 const &b)
- Vector3f8 &operator/=(const Scalarf8 &s)
Variables¶
Variable SPH::gaussian_abscissae_1¶
Defined in File GaussQuadrature.cpp
Variable SPH::gaussian_n_1¶
Defined in File GaussQuadrature.cpp
Variable SPH::gaussian_weights_1¶
Defined in File GaussQuadrature.cpp
Variable Utilities::logger¶
Defined in File Logger.h
Defines¶
Define _USE_MATH_DEFINES¶
Defined in File DragForce_Gissler2017.cpp
Define _USE_MATH_DEFINES¶
Defined in File PoissonDiskSampling.cpp
Define Documentation¶
-
_USE_MATH_DEFINES
Define _USE_MATH_DEFINES¶
Defined in File WindingNumbers.cpp
Define Documentation¶
-
_USE_MATH_DEFINES
Define compute_Vj_gradW_samephase¶
Defined in File FluidModel.h
Define forall_boundary_neighbors¶
Defined in File Simulation.h
Define forall_density_maps¶
Defined in File Simulation.h
Define forall_fluid_neighbors¶
Defined in File Simulation.h
Define forall_fluid_neighbors_in_same_phase¶
Defined in File Simulation.h
Define forall_volume_maps¶
Defined in File Simulation.h
Define INCREASE_COUNTER¶
Defined in File Counting.h
Define PD_USE_DIAGONAL_PRECONDITIONER¶
Defined in File TimeStepPF.h
Define RealVectorParameterType¶
Defined in File Common.h
Define USE_BLOCKDIAGONAL_PRECONDITIONER¶
Defined in File Viscosity_Weiler2018.h
Define Vec3Block¶
Defined in File TimeStepPF.cpp
Define Documentation¶
Warning
doxygendefine: Cannot find define “Vec3Block” in doxygen xml output for project “SPlisHSPlasH” from directory: ./doxyoutput/xml
Typedefs¶
Typedef AlignedBox2r¶
Defined in File Common.h
Typedef AlignedBox3r¶
Defined in File Common.h
Typedef AngleAxisr¶
Defined in File Common.h
Typedef AtomicRealVec¶
Defined in File TimeStepPF.cpp
Typedef Documentation¶
Warning
doxygentypedef: Cannot find typedef “AtomicRealVec” in doxygen xml output for project “SPlisHSPlasH” from directory: ./doxyoutput/xml
Typedef Matrix2r¶
Defined in File Common.h
Typedef Matrix3f¶
Defined in File Common.h
Typedef Matrix3r¶
Defined in File Common.h
Typedef Matrix4r¶
Defined in File Common.h
Typedef Matrix5r¶
Defined in File Common.h
Typedef Matrix6r¶
Defined in File Common.h
Typedef NeighborhoodSearch¶
Defined in File NeighborhoodSearch.h
Typedef Quaternionr¶
Defined in File Common.h
Typedef SystemMatrixType¶
Defined in File MatrixFreeSolver.h
Typedef Vector2i¶
Defined in File Common.h
Typedef Vector2r¶
Defined in File Common.h
Typedef Vector3f¶
Defined in File Common.h
Typedef Vector3r¶
Defined in File Common.h
Typedef Vector4f¶
Defined in File Common.h
Typedef Vector4r¶
Defined in File Common.h
Typedef Vector5r¶
Defined in File Common.h
Typedef Vector6r¶
Defined in File Common.h
Typedef VectorXr¶
Defined in File Common.h
Typedef Documentation¶
-
using
SPH::TimeStepPF::VectorXr= Eigen::Matrix<Real, -1, 1>
References¶
- AAT13
Nadir Akinci, Gizem Akinci, and Matthias Teschner. Versatile surface tension and adhesion for sph fluids. ACM Trans. Graph., 32(6):182:1–182:8, November 2013. URL: http://doi.acm.org/10.1145/2508363.2508395, doi:10.1145/2508363.2508395.
- AIA+12
Nadir Akinci, Markus Ihmsen, Gizem Akinci, Barbara Solenthaler, and Matthias Teschner. Versatile rigid-fluid coupling for incompressible sph. ACM Trans. Graph., 31(4):62:1–62:8, July 2012. URL: http://doi.acm.org/10.1145/2185520.2185558, doi:10.1145/2185520.2185558.
- BIT09
Markus Becker, Markus Ihmsen, and Matthias Teschner. Corotated SPH for deformable solids. In Proceedings of Eurographics Conference on Natural Phenomena, 27–34. 2009. URL: http://dx.doi.org/10.2312EG/DL/conf/EG2009/nph/027-034, doi:10.2312EG/DL/conf/EG2009/nph/027-034.
- BT07
Markus Becker and Matthias Teschner. Weakly compressible sph for free surface flows. In ACM SIGGRAPH/Eurographics Symposium on Computer Animation, SCA ‘07, 209–217. Aire-la-Ville, Switzerland, Switzerland, 2007. Eurographics Association. URL: http://dl.acm.org/citation.cfm?id=1272690.1272719.
- BK15
Jan Bender and Dan Koschier. Divergence-free smoothed particle hydrodynamics. In ACM SIGGRAPH / Eurographics Symposium on Computer Animation, SCA ‘15, 147–155. New York, NY, USA, 2015. ACM. URL: http://doi.acm.org/10.1145/2786784.2786796, doi:10.1145/2786784.2786796.
- BK17
Jan Bender and Dan Koschier. Divergence-free sph for incompressible and viscous fluids. IEEE Transactions on Visualization and Computer Graphics, 23(3):1193–1206, 2017. URL: http://dx.doi.org/10.1109/TVCG.2016.2578335, doi:10.1109/TVCG.2016.2578335.
- BKKW17
Jan Bender, Dan Koschier, Tassilo Kugelstadt, and Marcel Weiler. A micropolar material model for turbulent sph fluids. In ACM SIGGRAPH / Eurographics Symposium on Computer Animation, SCA ‘17. ACM, 2017. URL: http://doi.acm.org/10.1145/3099564.3099578, doi:10.1145/3099564.3099578.
- BKWK19
Jan Bender, Tassilo Kugelstadt, Marcel Weiler, and Dan Koschier. Volume maps: an implicit boundary representation for sph. In Proceedings of ACM SIGGRAPH Conference on Motion, Interaction and Games, MIG ‘19. ACM, 2019. URL: https://dl.acm.org/doi/10.1145/3359566.3360077, doi:10.1145/3359566.3360077.
- BMullerM15
Jan Bender, Matthias Müller, and Miles Macklin. Position-based simulation methods in computer graphics. In EUROGRAPHICS 2015 Tutorials. Eurographics Association, 2015. URL: http://dx.doi.org/10.2312/egt.20151045, doi:10.2312/egt.20151045.
- BMullerO+14
Jan Bender, Matthias Müller, Miguel A. Otaduy, Matthias Teschner, and Miles Macklin. A survey on position-based simulation methods in computer graphics. Computer Graphics Forum, 33(6):228–251, 2014. URL: http://dx.doi.org/10.1111/cgf.12346, doi:10.1111/cgf.12346.
- DCB14
Crispin Deul, Patrick Charrier, and Jan Bender. Position-based rigid body dynamics. Computer Animation and Virtual Worlds, 2014. URL: http://dx.doi.org/10.1002/cav.1614, doi:10.1002/cav.1614.
- GBP+17
Christoph Gissler, Stefan Band, Andreas Peer, Markus Ihmsen, and Matthias Teschner. Approximate air-fluid interactions for sph. In Virtual Reality Interactions and Physical Simulations, 1–10. April 2017. URL: http://dx.doi.org/10.2312/vriphys.20171081, doi:10.2312/vriphys.20171081.
- HWZ+14
Xiaowei He, Huamin Wang, Fengjun Zhang, Hongan Wang, Guoping Wang, and Kun Zhou. Robust simulation of sparsely sampled thin features in sph-based free surface flows. ACM Trans. Graph., 34(1):7:1–7:9, December 2014. URL: http://doi.acm.org/10.1145/2682630, doi:10.1145/2682630.
- ICS+14
Markus Ihmsen, Jens Cornelis, Barbara Solenthaler, Christopher Horvath, and Matthias Teschner. Implicit incompressible sph. IEEE Transactions on Visualization and Computer Graphics, 20(3):426–435, March 2014. URL: http://dx.doi.org/10.1109/TVCG.2013.105, doi:10.1109/TVCG.2013.105.
- IOS+14
Markus Ihmsen, Jens Orthmann, Barbara Solenthaler, Andreas Kolb, and Matthias Teschner. SPH Fluids in Computer Graphics. In Sylvain Lefebvre and Michela Spagnuolo, editors, Eurographics 2014 - State of the Art Reports. The Eurographics Association, 2014. URL: http://dx.doi.org/10.2312/egst.20141034, doi:10.2312/egst.20141034.
- KB17
Dan Koschier and Jan Bender. Density maps for improved sph boundary handling. In ACM SIGGRAPH/Eurographics Symposium on Computer Animation, 1–10. July 2017. URL: http://dx.doi.org/10.1145/3099564.3099565, doi:10.1145/3099564.3099565.
- KBST19
Dan Koschier, Jan Bender, Barbara Solenthaler, and Matthias Teschner. Smoothed particle hydrodynamics for physically-based simulation of fluids and solids. In Eurographics 2019 - Tutorials. Eurographics Association, 2019. URL: https://interactivecomputergraphics.github.io/SPH-Tutorial, doi:10.2312/egt.20191035.
- MMuller13
Miles Macklin and Matthias Müller. Position based fluids. ACM Trans. Graph., 32(4):104:1–104:12, July 2013. URL: http://doi.acm.org/10.1145/2461912.2461984, doi:10.1145/2461912.2461984.
- MMullerCK14
Miles Macklin, Matthias Müller, Nuttapong Chentanez, and Tae-Yong Kim. Unified Particle Physics for Real-Time Applications. ACM Trans. Graph., 33(4):1–12, 2014. URL: http://doi.acm.org/10.1145/2601097.2601152, doi:10.1145/2601097.2601152.
- PICT15
A. Peer, M. Ihmsen, J. Cornelis, and M. Teschner. An Implicit Viscosity Formulation for SPH Fluids. ACM Trans. Graph., 34(4):1–10, 2015. URL: http://doi.acm.org/10.1145/2766925, doi:10.1145/2766925.
- PGBT17
Andreas Peer, Christoph Gissler, Stefan Band, and Matthias Teschner. An implicit sph formulation for incompressible linearly elastic solids. Computer Graphics Forum, 2017. URL: http://dx.doi.org/10.1111/cgf.13317, doi:10.1111/cgf.13317.
- PT16
Andreas Peer and Matthias Teschner. Prescribed velocity gradients for highly viscous SPH fluids with vorticity diffusion. IEEE Transactions on Visualization and Computer Graphics, pages 1–9, 2016. URL: http://dx.doi.org/10.1109/tvcg.2016.2636144, doi:10.1109/tvcg.2016.2636144.
- SB12
Hagit Schechter and Robert Bridson. Ghost sph for animating water. ACM Trans. Graph., 31(4):61:1–61:8, July 2012. URL: http://doi.acm.org/10.1145/2185520.2185557, doi:10.1145/2185520.2185557.
- SP09
B. Solenthaler and R. Pajarola. Predictive-corrective incompressible sph. ACM Trans. Graph., 28(3):40:1–40:6, July 2009. URL: http://doi.acm.org/10.1145/1531326.1531346, doi:10.1145/1531326.1531346.
- TDF+15
T. Takahashi, Y. Dobashi, I. Fujishiro, T. Nishita, and M.C. Lin. Implicit Formulation for SPH-based Viscous Fluids. Computer Graphics Forum, 34(2):493–502, 2015. URL: http://dx.doi.org/10.1111/cgf.12578, doi:10.1111/cgf.12578.
- WKB16
Marcel Weiler, Dan Koschier, and Jan Bender. Projective fluids. In Proceedings of the 9th International Conference on Motion in Games, MIG ‘16, 79–84. New York, NY, USA, 2016. ACM. URL: http://doi.acm.org/10.1145/2994258.2994282, doi:10.1145/2994258.2994282.
- WKBB18
Marcel Weiler, Dan Koschier, Magnus Brand, and Jan Bender. A physically consistent implicit viscosity solver for sph fluids. Computer Graphics Forum (Eurographics), 2018. URL: https://doi.org/10.1111/cgf.13349, doi:10.1111/cgf.13349.