Software Architecture
SPlisHSPlasH follows a very intuitive and modular design approach. We want to illustrate part of the software architecture in conjunction with the simplified class diagram above. Note, that this documentation only covers the simulation part of SPlisHSPlasH. The whole software architecture follows a similar design pattern as the Model View Controller.
The Simulation class
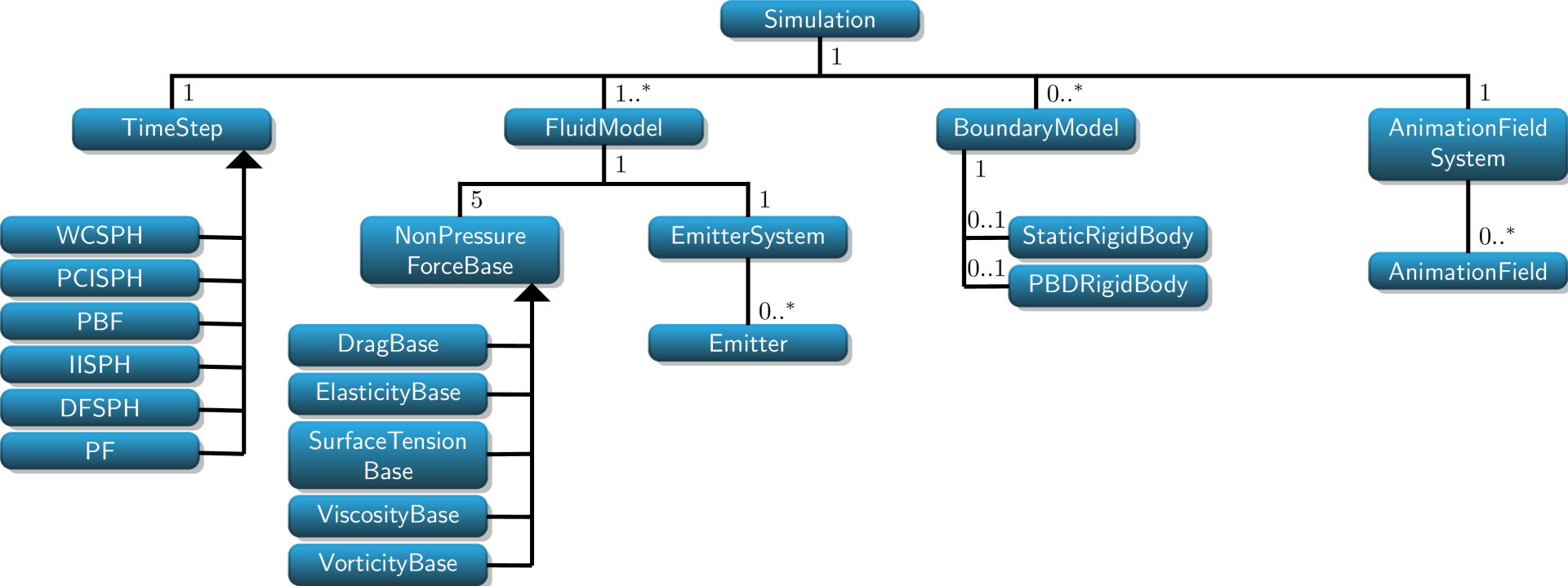
The simulation class is the main part of the software. It contains the currently used simulation method (TimeStep), all fluids (FluidModel), all boundaries (BoundaryModel), and a AnimationFieldSystem. It is defined as a singleton, thus only one simulation instance exists during the runtime. The simulation instance contains:
exactly one
TimeStepinstance, which defines the simulation loop and contains the pressure solverany number of
FluidModelinstances each defining a different fluid phaseany number of
BoundaryModelinstances representing either dynamic rigid bodies or static boundariesexactly one
AnimationFieldSysteminstance which allows to animate particles in a predefined area
The simulation class also implements the following:
evaluation of the SPH kernel methods
update of the time step size using a CFL condition
uniform invocation of all
EmitterSysteminstancesinvocation of
AnimationFieldSysteminstancesaving & loading the current simulation state
Lastly, the simulation class also contains a well defined interface for the neighborhood search functionalities defined in CompactNSearch or cuNSearch, which are further needed in the respective algorithm implementations in e.g. the TimeStep or NonPressureForces.
The TimeStep class
The TimeStep class is a abstract base class for any subsequent derived simulation method one wants to implement. It implements the required interface for the simulation class, noteably the step() function containing the simulation algorithm called in the main loop. During execution there exists exactly one instance of a TimeStep class. By default SPlisHSPlasH currently implements the following pressure solvers and the corresponding simulation algorithms:
WCSPH
PCISPH
PBF
IISPH
DFSPH
Projective Fluids
The FluidModel class
A FluidModel instance represents a fluid phase with its respective properties and applied effects to it. SPlisHSPlasH allows for arbitrary many FluidModels inside a simulation as long as there is at least one and they all have a different id (see scene file format). One FluidModel contains the following:
Physical parameters like rest density, mass, position, velocity, acceleration and current density
Simulation parameters like the number of particles, their state and ID
References to the applied non-pressure effects, one for each:
Drag
Elasticity
Surface tension
Viscosity
Vorticity
Emitter systems
Concerning the non-pressure effects, each FluidModel can only utilize up to one method per non-pressure effect, which will be directly included in the computation inside the computeNonPressureForces() method of the Simulation class. Thus having e.g. two different surface tension algorithms inside one FluidModel is not possible. However, it is possible to define e.g. two phases, which have a different viscosity model and only one regarding surface tension effects.
The emitters are only stored inside the FluidModels since they are assigned to a fixed FluidModel. Their functionalities are uniformly executed by the Simulation class in the emitParticles() step usually invoked at the end of the simulation loop of the current TimeStep instance.
The BoundaryModel class
The BoundaryModel class provides a useful base class for any boundary handling methods. It stores a RigidBodyObject reference representing the object of the boundary. This can be a stationary or dynamic rigid body, whose coupling effects are handled uniformly. Note that RigidBodyObject is an abstract class providing an interface for the two derived classes StaticRigidBody and PBDRigidBody. The first is handled internally and represent stationary objects. The latter describes a moving rigid body which is simulated externally by the PositionBasedDynamics library. SPlisHSPlasH implements three different boundary models:
Particle-based rigid-fluid coupling [Akinci et al. 2012]
Density maps [Koschier and Bender 2017]
Volume maps [Bender et al. 2019]
Finally, SPlisHSPlasH defines a boundary as a list of rigid bodies in conjunction with a rigid-fluid coupling algorithm.